Choisir des coordonnées adaptées à la géométrie d’un problème, c’est parfois la clé pour mieux le comprendre ou simplifier les calculs. Les coordonnées polaires sont naturelles quand on a une symétrie autour d’un centre. Les coordonnées bipolaires, moins connues, sont utiles dans l’étude de systèmes ayant deux sources, comme les champs électriques et magnétiques autour de deux fils conducteurs. Elles reposent sur le surprenant théorème des cercles d’Apollonius.
 Dans une ville, les rues et les avenues peuvent être rectilignes ou courbes et ainsi former différents types de grilles : modèle New-York, médiéval ou autre. Il en va de même pour les systèmes de coordonnées en 2 dimensions !
Dans une ville, les rues et les avenues peuvent être rectilignes ou courbes et ainsi former différents types de grilles : modèle New-York, médiéval ou autre. Il en va de même pour les systèmes de coordonnées en 2 dimensions !
Le système de coordonnées cartésiennes repose sur deux familles de courbes, l’ensemble des droites \(\{x = k\}\) et l’ensemble des droites \(\{y = k’\}\), telles que toute courbe de la première famille a un unique point d’intersection avec une courbe de la deuxième famille. Ceci permet de situer un point du plan par l’intersection d’une courbe de la première famille avec une courbe de la deuxième famille, tout comme on se donne rendez-vous au coin de la 2e rue et la 3e avenue.
En coordonnées polaires, la première famille de courbes est l’ensemble des cercles \(\{r=k\}\) et la deuxième famille de courbes est l’ensemble des demi-droites \(\{θ = k’\}\) issues de l’origine (figure 1). Dans cet exemple, comme dans le précédent, les deux familles de courbes sont orthogonales.
 Le système de coordonnées bipolaires
Le système de coordonnées bipolaires
Ce système de coordonnés convient aux situations dans lesquelles on a deux points distingués du plan. Les deux familles de courbes qui le constituent sont des cercles et des arcs de cercles (figure 2). Regardons leur définition.
Soit P un point du plan et notons \(d_1 = |P_1P|, d_2 = |P_2P|\) (figure 3). Les coordonnées bipolaires de \(P\) sont
\[\tau =\ln \displaystyle \left ( \frac{d_1}{d_2} \right ) \text { et } \sigma = \angle P_1PP_2. \]
Positionnons \(P_1\) et \(P_2\) à \((x, y) = (\pm a, 0)\) et explorons ces coordonnées.

Courbes de coordonnée \(\tau\) constante
Pour que la coordonnée \(\tau = \ln (d_1 /d_2)\) soit constante, il faut que le rapport \(d_1/d_2\) le soit lui aussi. Le premier ensemble de courbes du système bipolaire est donc formé des lieux géométriques
\[\displaystyle \left \{ \frac{|PP_1|}{|PP_2|} =k \right \}, \]
où \(P\) est un point quelconque du plan. Le théorème des cercles d’Apollonius (voir encadré) affirme que ces lieux sont des cercles si \( k \neq 1\) et une droite, la médiatrice du segment \(P_1P_2,\) si \(k = 1.\)
La figure 4 montre l’ensemble des points tels que \(d_1/d_2 = 2.\) Ces points ont une coordonnée \(\tau = \ln(2) \approx 0.69.\) La figure 5 montre un ensemble de courbes de coordonnée \(\tau\) constante.

Figure 4 – Courbe d’équation \(\tau\) = ln(2).

Courbes de coordonnée \(\sigma\) constante
Euclide a démontré que tous les angles inscrits interceptant le même arc de cercle \(\overset {\large \frown}{P_1P_2}\) ont la même mesure, soit la moitié de l’angle au centre \(\angle P_1CP_2\) (figure 6). Le lieu géométrique des points \(P\) pour lesquels l’angle orienté \(\sigma = \angle P_1PP_2\) est constant est donc un arc de cercle (ou une portion de droite si \(\sigma = 0°\) ou \(\sigma = 180˚).\) On l’appelle arc capable1.

Figure 6 – Courbe d’équation \(\sigma\) = 30 ̊. Les angles \(\sigma, \beta\) et \(\alpha\) sont congrus car ils interceptent le même arc \(\overset {\large \frown}{P_1P_2}.\)
La figure 7 présente un ensemble d’arcs capables, où l’angle est en radians.

Figure 7 – Courbes de coordonnée \(\sigma\) constante.
Grille bipolaire : deux familles de cercles
La grille bipolaire, formée des courbes de coordonnée \(\tau\) ou \(\sigma\) constante, consiste en deux familles de courbes : des cercles et des arcs de cercles (figures 2 et 8). En chaque point d’intersection de deux courbes de cette grille, l’angle est de 90° (voir l’encadré L’inversion surprise !).

Figure 8 – Grille bipolaire. Le point P est situé à l’intersection de l’arc \(\sigma = \pi/2\) et du cercle \(\tau = 1/2,\) le point Q en \(\sigma = \pi/4\) et \(\tau = −1.\)
Valeur de \(\tau\) en \(P_1\) et \(P_2\) ?
Attention ! Pour établir la valeur de \(\tau\) aux deux points de référence du système, étudions ce qui se passe quand \(P\) s’approche très près de \(P_1\) ou de \(P_2\) sans y toucher
— Si \(P \to P_1,\) alors \(d_1 \to 0\) donc \(\displaystyle \frac{d_1}{d_2} \to 0\) et \(\tau \to -\infty.\)
— \(P \to P_2,\) alors \(d_2 \to 0\) donc \(\displaystyle \frac{d_1}{d_2} \to \infty\) et \(\tau \to \infty.\)
Théorème des cercles d’Apollonius
(∼ 260 av. J.-C.)
Soient \(P_1\) et \(P_2\) deux points du plan. Considérons un point \(P\) quelconque et notons ses distances aux deux points fixes \(d_1 = |PP_1|\) et \(d_2 = |PP_2|.\) Le lieu géométrique des points où \(d_1/d_2\) est une constante est
— une droite si \(d_1/d_2 = 1.\) Cette droite est la médiatrice du segment \(P_1P_2\) (figure 9).
— un cercle si \(d_1/d_2 \neq 1.\)

La démonstration utilise une propriété intéressante et peu connue de la bissectrice d’un angle, voir p. 21.
Théorème de la bissectrice
(Prop. 3 du livre VI des éléments d’Euclide)
Dans un triangle ABC, la bissectrice intérieure en B découpe le côté AC dans le rapport des côtés adjacents. La bissectrice extérieure aussi.
Réciproquement, si une droite passant par le sommet B découpe le côté AC dans le rapport des côtés adjacents à B, alors c’est une bissectrice en B.

Figure 10 – La bissectrice intérieure en B découpe le côté AC dans le rapport des côtés adjacents. Ici, 6/4 = 3/2. La bissectrice extérieure aussi \(\displaystyle \frac{|BA|}{|BC|} = \frac{|GA|}{|GC|}.\)
Preuve des cercles d’Apollonius
Regardons la figure 11. \(P\) est un point tel que
\[\displaystyle \frac{|P_1P|}{|P_2P|} = k.\]
Plaçons les points \(Q_1\) et \(Q_2\) sur la droite \(P_1P_2\) de sorte que
\[\displaystyle \frac{|P_1Q_1|}{|P_2Q_1|} = \frac{|P_1Q_2|}{|P_2Q_2|} = \frac{|P_1P|}{|P_2P|} = k.\]
Par la réciproque du théorème de la bissectrice du triangle \(P_1PP_2, PQ_1\) est la bissectrice intérieure de l’angle \(\angle P_1PP_2\) et \(PQ_2\) est la bissectrice de l’angle extérieur \(\angle P_2PR.\)

Figure 11 – Preuve du théorème des cercles d’Apollonius.
Montrons que \(P\) est sur le cercle de diamètre \(Q_1Q_2.\) Pour cela, il suffit de montrer que l’angle \(\angle Q_1PQ_2\) est droit (les points de la circonférence voient le diamètre avec un angle droit.) Comme les angles \(\angle P_1PP_2\) et \(\angle P_2PR\) sont supplémentaires, leur somme vaut 180 ̊. Ainsi, la somme de leurs moitiés, \(\angle Q_1PP_2\) et \(\angle P_2PQ_2,\) vaut 90° : \(\angle Q_1PQ_2\) est donc droit.
Application à l’électromagnétisme
Les coordonnées bipolaires servent à étudier des phénomènes présentant une symétrie autour de deux pôles. Par exemple, un système électrique composé d’une source, d’une résistance et de deux longs fils parfaitement conducteurs parcourus d’un courant constant (figure 12).

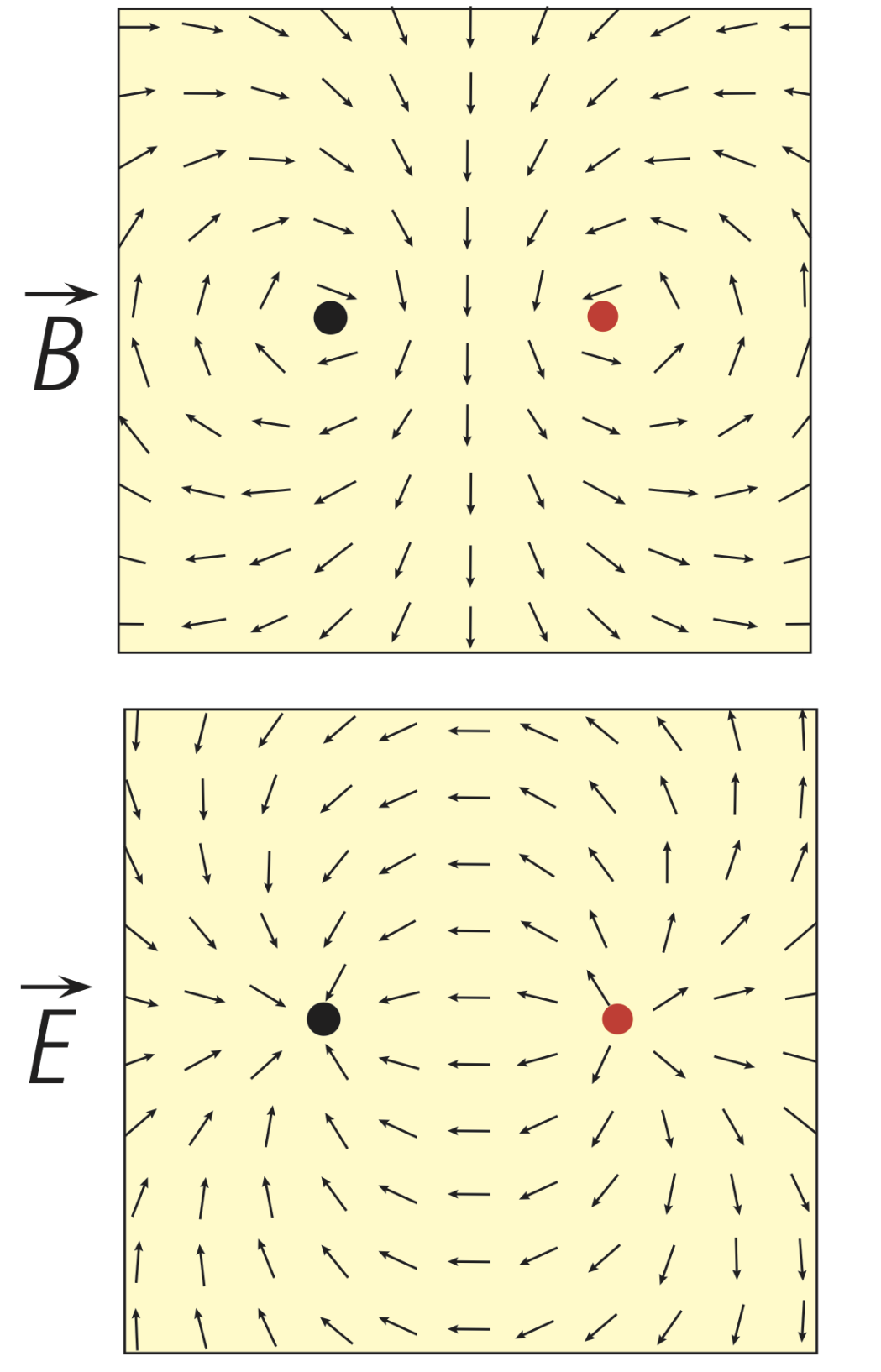
Figure 13. En haut, le champ électrique \(\vec{B}\) dans le plan perpendiculaire à deux fils; en bas, le champ magnétique \(\vec{E},\) avec des vecteurs tracés de la même longueur.
Les charges électriques produisent un champ électrique \(\overrightarrow{E}\) tandis que les charges électriques en mouvement (un courant) produisent un champ magnétique \(\overrightarrow{B}.\) En observant ces champs vectoriels dans le plan perpendiculaire aux fils (figure 13), on reconnaît l’allure de la grille bipolaire, ce qui en fait un système de coordonnées très utile dans ce contexte. Tentons de comprendre pourquoi les vecteurs de ces champs s’alignent ainsi.
Champ électrique
Nous voulons établir l’allure des vecteurs du champ \(\overrightarrow{E}\) dans le plan perpendiculaire aux deux fils de la figure 12. Pour cela, nous allons nous appuyer sur une propriété spéciale du champ électrique : les vecteurs du champ électrique sont perpendiculaires aux courbes de niveau d’une fonction appelée potentiel électrique, notée \(V.\)2
Nous allons montrer que, les courbes de potentiel électrique \(V\) constant sont des cercles de coordonnée bipolaire \(\tau\) constante ! Puisque les vecteurs du champ électrique sont perpendiculaires aux courbes de niveau de \(V,\) cela implique que le vecteur \(\overrightarrow{E}\) au point \(P\) est perpendiculaire au cercle de la grille bipolaire passant par \(P\) (figure 14).

Figure 14 – Le vecteur \(\vec{E}\) du champ électrique en P est perpendiculaire au cercle de coordonnée \(\tau\) constante.
Voyons les détails. Il est possible de démontrer que le système de la figure 12 se comporte comme deux fils infinis sans épaisseur, ce qui simplifie son analyse.
Dans le plan \(XY\) perpendiculaire aux fils, ceux-ci sont situés en \(P_1(−a, 0)\) pour le fil dont courant est dans le sens des \(z\) négatifs et \(P_2(a, 0)\) pour le fil dont le courant dans le sens des \(z\) positifs.3
Nous admettrons que le champ électrique d’un fil infini uniformément chargé est radial et que son intensité en un point varie de façon inversement proportionnelle à \(d,\) la distance entre le point et le fil. Quant au potentiel électrique \(V,\) il varie proportionnellement à \(\ln(d).\) Nommons \(c\) la constante de proportionnalité.
Si une charge électrique positive est placée en \(P,\) elle sera attirée vers \(P_1\) et repoussée de \(P_2.\) La charge suivra localement la direction et le sens du vecteur \(\overrightarrow{E} = \overrightarrow{E_1} + \overrightarrow{E_2}\) (figure 15).

Figure 15 – Champ électrique \(\vec{E }\) au point P.
Notons \(V_1\) la fonction du potentiel électrique du fil 1, obtenue en posant \(V_1 = 0\) au point milieu entre \(P_1\) et \(P_2.\) De même pour le fil 2. On a
\[\begin{array} {l l c l l}\displaystyle ||\overrightarrow{E}_1||& =& \displaystyle \frac{c}{d_1}, & V_1 &=& c \ln \displaystyle \left ( \frac{d_1}{a} \right ), \\ \displaystyle ||\overrightarrow{E}_2||& =& \displaystyle \frac{c}{d_2}, & V_2 &=& -c \ln \displaystyle \left ( \frac{d_2}{a} \right ) \end{array}\]
D’où \(\overrightarrow{E} = \overrightarrow{E}_1 + \overrightarrow{E}_2\) et, en utilisant une propriété des logarithmes,
\[ V = V_1 + V_2 = c \ln \displaystyle \left ( \frac{d_1}{d_2} \right ) = c \tau.\]
La fonction \(V\) dépend uniquement de \(\tau,\) ce qui montre que les points de coordonnée \(\tau\) constante ont le même potentiel électrique. Le cercle d’Apollonius formé par ces points constitue donc une courbe de niveau de la fonction \(V\) (cercle rose de la figure 14), il est donc perpendiculaire au vecteur \(\overrightarrow{E}.\)
Champ magnétique
 L’aiguille d’une boussole est déviée lorsqu’elle se trouve près d’un fil électrique parcouru par un courant. Selon sa position, l’aiguille de la boussole suit des courbes imaginaires appelées lignes de champ magnétique.
L’aiguille d’une boussole est déviée lorsqu’elle se trouve près d’un fil électrique parcouru par un courant. Selon sa position, l’aiguille de la boussole suit des courbes imaginaires appelées lignes de champ magnétique.
Dans le cas d’un fil unique, le champ magnétique \(\overrightarrow{B}\) est perpendiculaire au champ électrique \(\overrightarrow{E}\) et au fil. Son sens dépend du sens du courant (figure 16). L’intensité de \(\overrightarrow{B}\) en un point est inversement proportionnelle à la distance entre le point et le fil. Pour deux fils ou plus, on additionne les vecteurs.
Il se trouve que, pour le dispositif de deux fils que nous étudions, \(\overrightarrow{B}\) est perpendiculaire à \(\overrightarrow{E}\) en tout point. Ainsi, \(\overrightarrow{B}\) est tangent au cercle de \(\tau\) constant (figure 14), ce qui explique l’allure du champ (figure 13).
En effet, soit \(\overrightarrow{B_1}\) et \(\overrightarrow{B_2}\) les champs magnétiques des fils 1 et 2, respectivement perpendiculaires à \(\overrightarrow{E_1}\) et \(\overrightarrow{E_2},\) ainsi qu’aux fils. Les deux fils ont un courant de même intensité mais de sens opposé. La figure 13 montre que le courant entre dans le plan en \(P_1\) et en sort en \(P_2.\) Illustrons les 4 vecteurs et les angles entre eux à la figure 17 en remarquant que \(\cos(\theta_2) = −\cos(\theta_1).\) C’est cette dernière propriété qui assure que \(\overrightarrow{E} \cdot \overrightarrow{B} =0,\) et donc que \(\overrightarrow{E} \perp \overrightarrow{B}.\)

L’importance d’un système de coordonnées adapté à la géométrie du problème
Pour évaluer une intégrale sur une surface, on a avantage à choisir un système de coordonnées adapté à la géométrie du problème. Tout devient plus simple : la fonction à intégrer et les bornes d’intégration.
Par exemple, pour déterminer la puissance transportée à l’extérieur des fils de la figure 12, on doit intégrer une certaine fonction sur \(D,\) la région infinie qui correspond à l’extérieur des fils électriques et qui se situe dans le plan perpendiculaire aux fils4. En coordonnées cartésiennes, cela conduit à des intégrales impropres difficiles à calculer, même avec des logiciels spécialisés.
En coordonnées bipolaires, si les surfaces des fils correspondent aux cercles de coordonnée \(\tau = −2\) et \(\tau = 2\) (figure 18), la région infinie \(D\) possède des bornes finies !!! Elle se décrit simplement à l’aide des inégalités suivantes :
\[D = \{(\sigma, \tau ) | 0 \leq \sigma < 2 \pi,−2 \leq \tau ≤ 2\}.\]

Conclusion
Il existe plusieurs systèmes de coordonnées, basés sur différentes familles de courbes. Les cercles d’Apollonius et les arcs capables d’Euclide sont au coeur du système bipolaire, un système orthogonal utile pour modéliser les quantités proportionnelles aux distances d’un point à deux sources.
L’inversion surprise !
L’inversion, une transformation du plan
Considérons le cercle de centre \(C\) et de rayon \(r,\) et un point \(P\) différent de \(C.\) L’inversion de \(P\) par rapport à ce cercle est le point \(P’\) sur la demi-droite \(CP\) tel que \(\overline{CP} . \overline{CP’} = r^2\) (figure 19). Ainsi les points à l’extérieur du cercle ont une image à l’intérieur, et vice versa. Un point sur le cercle est son propre inverse. Le centre du cercle, \(C,\) est envoyé à l’infini.
Images des cercles et droites
La figure 19 illustre une des propriétés spectaculaires de l’inversion : elle transforme un cercle ne passant pas par \(C\) en un cercle ne passant pas pas \(C,\) et une droite ne passant pas par \(C\) en cercle passant par \(C\) !

Figure 19 – Images d’un cercle et d’une droite par inversion.
Une autre propriété spectaculaire de l’inversion est qu’elle préserve les angles (mais change leur orientation).5
De la grille bipolaire à la grille polaire
En choisissant bien le cercle d’inversion, on transforme la grille bipolaire en grille polaire et réciproquement. Les arcs de cercles bleus (de \(\sigma\) constante) sont transformés en demi-droites passant par l’origine (\(\theta\) constante), tandis que les cercles mauves (de \(\tau\) constante) deviennent des cercles centrés à l’origine (de \(r\) constante). Le cercle d’inversion est tracé en pointillé sur la figure 20. Il est centré en \(P_2.\) Son rayon est choisi de sorte que l’image de \(P_1\) soit l’origine (voir exercice). Ainsi, puisque la grille polaire est orthogonale et que l’inversion préserve les angles, nous pouvons conclure que la grille bipolaire est orthogonale elle aussi.
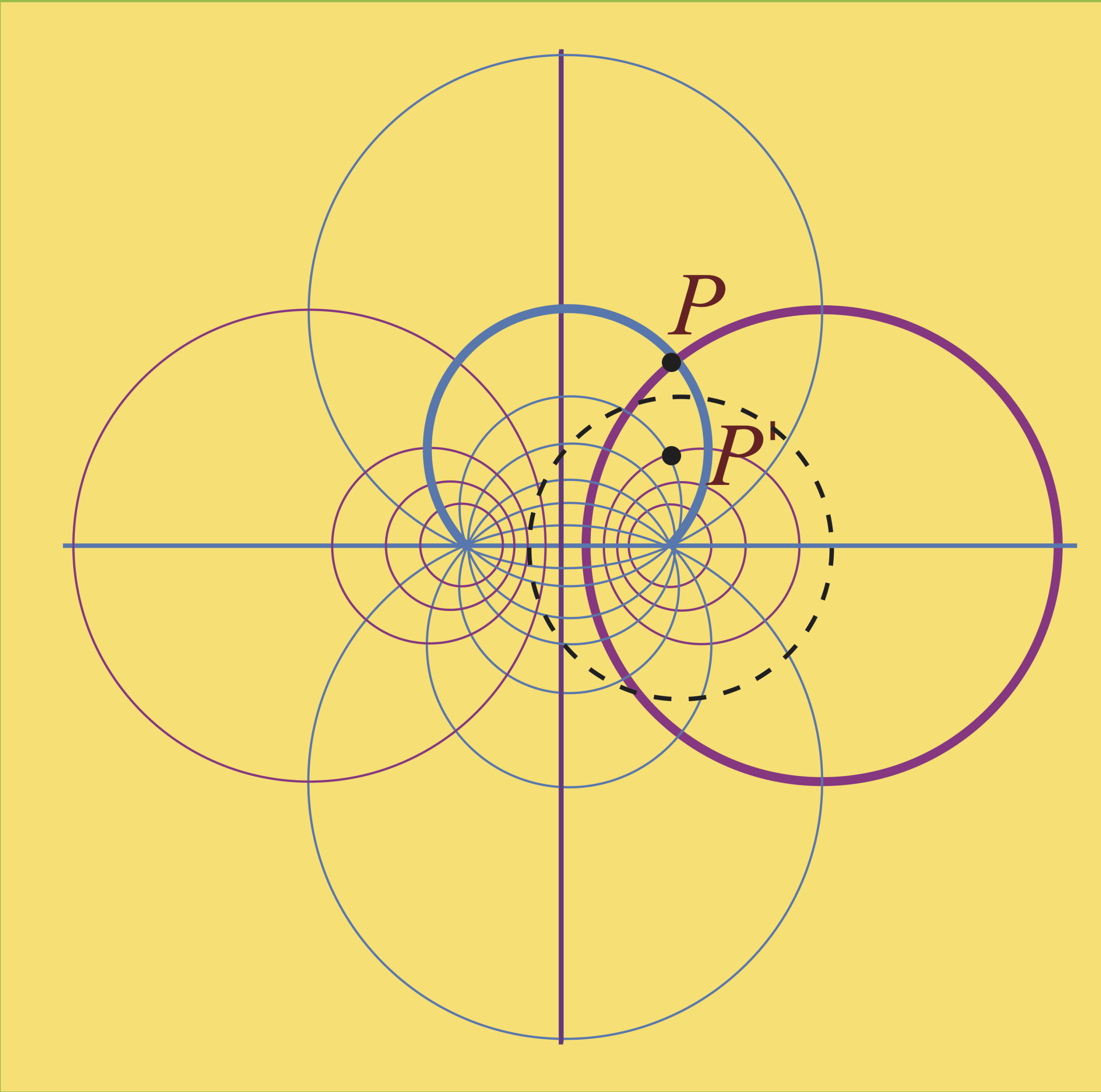
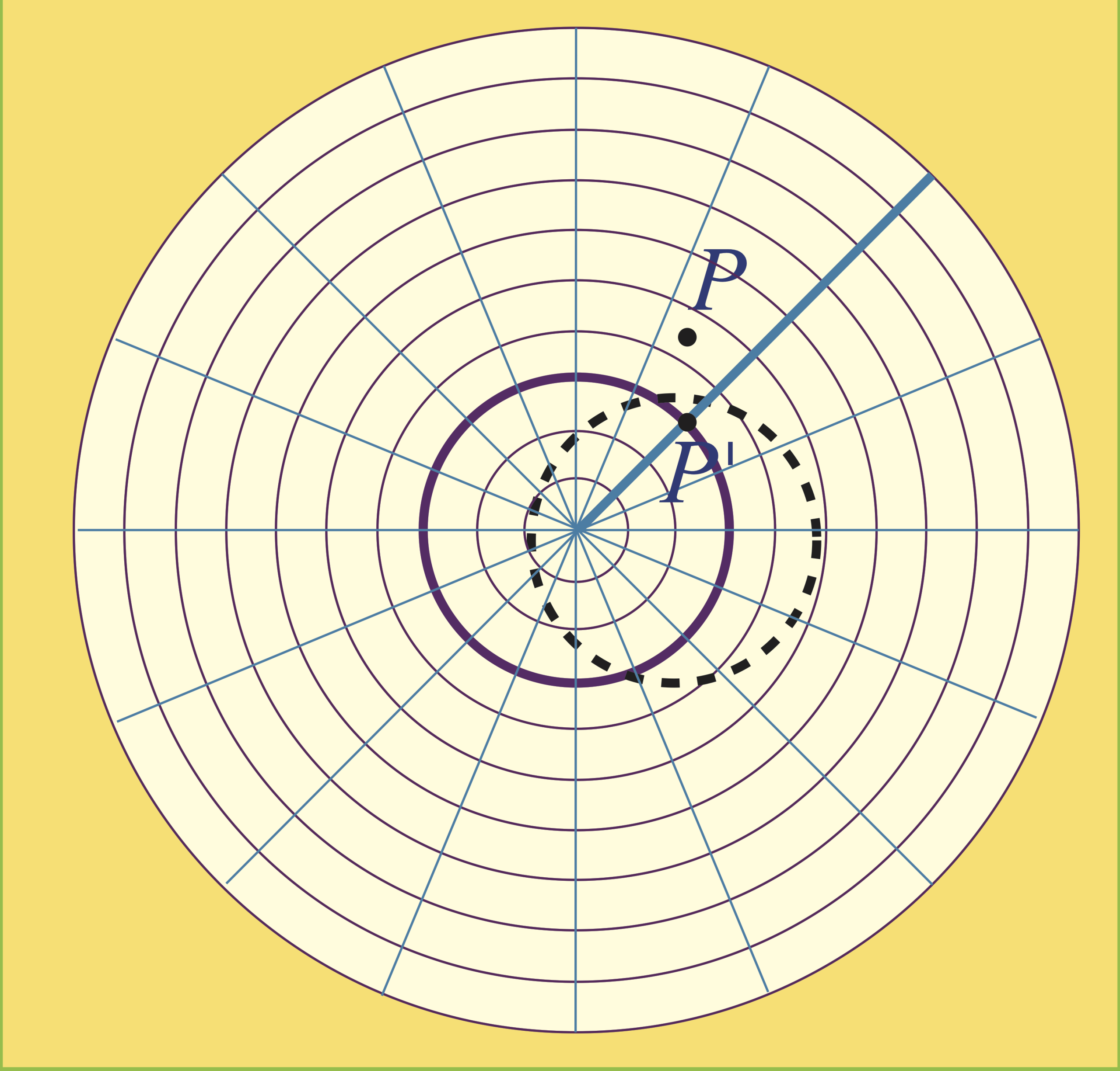
Figure 20 – Une inversion bien choisie transforme la grille bipolaire en grille polaire !
Pour en s\(\alpha\)voir plus !
- Vidéo GA III6 Inversion par rapport à un cercle (2020), Maths sous Dopamine. Excellente vidéo qui montre que les images des droites et des cercles sont des droites et des cercles (et donc que toute construction à la règle et au compas peut être réalisée au compas uniquement : théorème de Mohr-Mascheroni de 1672). « Faire de la géométrie sans voir l’inversion, c’est un peu comme aller à Marseille sans voir la mer, à Paris sans voir la tour Eiffel, à New York sans voir la statue de la Liberté… »
https://www.youtube.com/watch?v=G26IKP3b5b4 - Animation Desmos illustrant différents systèmes de coordonnées orthogonales en deux dimensions, dont les coordonnées bipolaires : https://www.desmos.com/calculator/m5gmtg4n1d?lang=fr
- Edmund Halley, mieux connu pour la comète qui porte son nom, publia en 1710 une édition du célèbre ouvrage Les Coniques d’Apollonius. Halley y présente des traductions du grec au latin déjà existantes des livres I à IV, sa propre traduction en latin des versions arabes des livres V à VII, et sa reconstruction du livre VIII basée sur un texte de Pappus. On peut consulter en ligne un exemplaire d’origine et admirer la beauté des figures. https://archive.org/details/bub_gb_6N__e_V4xbAC/page/n5/mode/2up
- L’article « La position d’un navire » dans Accromath, Vol. 19.1, hiver-printemps 2024 explique que ces arcs capables sont utiles pour se repérer sur l’eau. ↩
- En fait, pour ceux qui connaissent la notion de gradient, on a \(\overrightarrow{E}\) = – grad(\(V\)). ↩
- Ces points sont les centres effectifs des fils, qui ne correspondent pas exactement aux centres géométriques des fils : (voir Problème et DC Power Transported by Two Infinite Parallel Wires, par Marc Boulé, American Journal of Physics 92(1), pp. 14-22 (2024). ↩
- Voir à nouveau l’article de Marc Boulé. ↩
- L’article « Pavages hyperboliques », Yvan Saint-Aubin, Accromath, Volume 5.1 – hiver-printemps 2010 montre de belles applications de l’inversion basées sur le fait que l’inversion préserve les angles. ↩