
En 1950, le physicien et mathématicien britannique Sir Geoffrey Ingram Taylor (1886–1975) publia un modèle mathématique approximant l’énergie libérée par une explosion effectuée lors d’essais nucléaires secrets américains en 1945. Dans le climat de guerre froide de l’époque, l’armée américaine fut si surprise par la précision de cette approximation, non basée sur leurs données secrètes, qu’elle réprimanda Taylor!
Une partie du modèle mathématique de Taylor repose sur un principe que nous allons explorer dans cet article.
Nous allons voir comment on peut obtenir la structure de base de modèles mathématiques de façon élégante en commençant par l’étude des unités pour les dimensions (distance, temps, masse, etc) qui se retrouvent dans le problème. Vous savez qu’il est pratique de donner des unités pour des grandeurs courantes, par exemple, compter le temps en secondes, la distance en mètres, la vitesse en mètres par seconde, etc. On dit que ces grandeurs sont dimensionnelles. Certaines grandeurs peuvent être moins familières, telle la masse volumique avec unités de kilogrammes par mètre cube (kg/m3) ou bien la force qui se mesure en Newtons qui sont des kilogramme-mètres par seconde au carré (kg.m/s2). Les unités utilisées ici seront toujours du système international (SI), communément appelé système métrique.
Supposons une combinaison (multiplication, division, etc) de grandeurs dimensionnelles se retrouvant des deux côtés d’une équation. Il est alors impératif que les combinaisons d’unités se retrouvant de chaque côté soient exactement les mêmes. C’est-à-dire qu’il faut un équilibre des unités pour que l’équation soit valide! C’est le principe de base de la méthode connue sous le nom « d’analyse dimensionnelle ». Nous allons illustrer la méthode avec deux exemples relativement élémentaires: un de physique et l’autre en écologie. Ensuite, nous allons résumer l’approche de Taylor. Grâce à ces exemples, nous allons pouvoir énoncer un théorème général qui permet de faire des calculs systématiques en analyse dimensionnelle.
Les oscillations d’un chariot
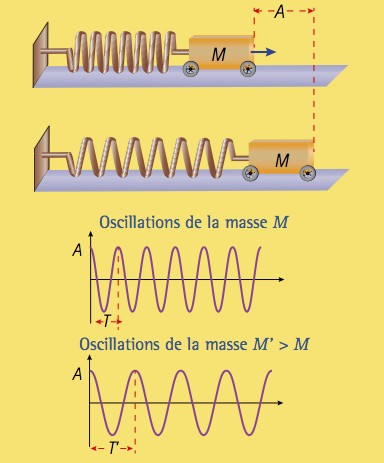 Commençons par le problème suivant que vous avez sans doute déjà rencontré dans le cadre d’un cours de physique. Considérons un chariot de masse M (en kg) sur un plan horizontal attaché à un mur par un ressort ayant une constante de rappel k (ou constante de Hooke), voir figure ci-contre.
Commençons par le problème suivant que vous avez sans doute déjà rencontré dans le cadre d’un cours de physique. Considérons un chariot de masse M (en kg) sur un plan horizontal attaché à un mur par un ressort ayant une constante de rappel k (ou constante de Hooke), voir figure ci-contre.
Si nous négligeons la friction du ressort et des roues sur le plan, alors en déplaçant le chariot de sa position au repos à x = 0 par une distance A > 0 et en le relâchant avec vitesse initiale 0, il est raisonnable de penser que le chariot va décrire un mouvement oscillatoire de période T et d’amplitude A. Nous pouvons obtenir de l’information sur T de façon heuristique. En effet, pour deux ressorts de raideurs k1 < k2, le chariot relié au ressort plus raide, k2, sera ramené vers sa position initiale plus rapidement qu’avec le ressort k1 et donc sa période d’oscillation sera plus courte. Supposons que le ressort a une constante de rappel k. Si nous augmentons la masse de M à M’, alors la période d’oscillation sera augmentée puisque la force F fournie par le ressort doit combattre une inertie plus grande. Par la loi de Newton, F = M’a’ = Ma implique que a’ < a. Donc l’accélération (et la vitesse) sera réduite. Est-ce que ces déductions peuvent être obtenues de manière plus précise? Qu’en est-il de l’influence de A sur T? Dans un cours de physique, ce problème est abordé dans un cadre expérimental ou de façon théorique en résolvant une équation différentielle de deuxième ordre, ce qui est assez complexe! Or, l’analyse dimensionnelle résout ce problème grâce au principe d’équilibre des unités de mesure en un seul calcul bien simple. Voyons les détails.
Le problème possède les grandeurs suivantes pour lesquelles nous identifions les unités: le déplacement initial A (en mètres, m), la constante de raideur k (en Newton par mètre, Nm–1), la masse M (en kg) et la période T (en secondes, s). Notez que le Newton se décompose en des unités plus élémentaires, N = kg.ms–2, ce qui implique que les unités de k sont kg.s–2. Nous voulons obtenir un estimé de la période T en fonction de A, k et M, nous écrivons ceci :
\[T = f(A; k; M),\: (1)\]
où f est une fonction inconnue. Puisque T est en secondes, \(f(A; k; M)\) doit aussi avoir des secondes comme unité. Donc, il nous faut trouver trois constantes \(\alpha\), \(\beta\) et \(\gamma\) telles que :
\[s = (m)^{\alpha} (kg)^{\beta} (kg.s^{-2})^{\gamma}. \]
En regroupant les unités, on a alors :
\[s = (m)^{\alpha} \cdot (kg)^{\beta+\gamma}. (s)^{-2\gamma}.\]
Pour que les unités soient les mêmes dans les deux membres de l’équation, il faut résoudre le système d’équations :
\[\left \{ \begin {array} {r c l} \alpha & = & 0\\\beta+\gamma & = & 0 \\ -2\gamma &=& 1 \end {array} \right .\]
La solution s’obtient facilement, on doit avoir \(\alpha = 0, \beta + \gamma = 0\) et \(\gamma = -1/2,\) d’où \(\beta = 1/2.\)
Puisque \(\alpha = 0,\) l’unité de distance est absente de la relation. Par conséquent, la fréquence d’oscillation ne dépend pas de la distance de déplacement de la masse par rapport à sa position initiale.
Puisque \((kM^{-1})^{1/2}\) a des unités de \(s^{-1}\), nous pouvons éliminer toutes les unités de l’équation (1) en multipliant l’équation par cette quantité. Puisque f est inconnue, nous pouvons écrire :
\[F(A; k; M) = (kM^{-1})^{1/2}f (A; k; M)\]
et nous obtenons :
\[\sqrt{\frac{k}{M}} T=F(A;k;M).\]
Nous désignons le terme du côté gauche de l’équation par \(\Pi = (kM^{-1})^{1/2}T\) et ce terme est sans dimension puisque toutes les unités s’annulent.
L’observation cruciale ici est que si on change les unités des grandeurs A, k et M de la fonction F, par exemple, les mètres en centimètres ou les kilogrammes en grammes, alors F doit nécessairement changer de valeur. Mais le côté gauche est invariant puisqu’il est sans dimension. Ceci implique que la fonction F du membre de droite ne peut dépendre de A, k ou M. Par conséquent, la fonction F(A; k; M) est une constante que nous notons F0. On a donc :
\[\sqrt{\frac{k}{M}}T=F_0,\]
d’où
\[T=F_0 \sqrt{\frac{M}{k}}.\]
On constate à nouveau que la période ne dépend pas de A. De plus, nous avons précisé la dépendance obtenue heuristiquement ci-dessus puisque la variation de T est directement proportionnelle à la racine carrée de M et inversement proportionnelle à la racine carrée de k.
Description de la démarche
Pour généraliser la démarche, il faut d’abord identifier les dimensions de base du problème, c’est-à-dire celles qui ne peuvent être décomposées en fonction d’autres dimensions.
Dans l’exemple du chariot, ce sont la masse en kilogrammes, le temps en secondes et la distance en mètres.
Il y a quatre grandeurs mesurables qui sont : u = T, du côté gauche de l’équation ainsi que W1 = M, W2 = k et W3 = A que nous appelons grandeurs primaires. Celles-ci s’écrivent en fonction des dimensions de base.
En adoptant cette notation plus générale, l’équation T = f(A; k; M) de cet exemple s’écrit u = f(W1; W2; W3) où f est une fonction inconnue.
L’analyse dimensionnelle a été développée initialement pour aborder des problèmes de physique. Avec le temps, plusieurs autres disciplines scientifiques ont adopté cette approche comme l’illustre l’exemple en écologie présenté en encadré.
Exemple en écologie
La compréhension des mécanismes qui régissent l’occupation du territoire par les membres d’une espèce est un problème important en écologie. Entre autres, une des questions est de pouvoir évaluer les bénéfices de contrôler un territoire donné1. Les besoins énergétiques de l’animal faisant partie des bénéfices à évaluer, considérons ce cas pour un prédateur. Les besoins énergétiques, B, sont mesurés en joules par seconde (J·s–1, énergie par unité de temps). Supposons que B dépend des grandeurs suivantes : l’aire du territoire A (m2), la densité \(\rho\), c’est-à-dire la quantité de proies par unité de superficie (q·m–2), la vitesse moyenne de déplacement \(\sigma\) (m · s–1), l’énergie e fournie par proie (J·q–1) et finalement le temps de manipulation h de la proie (s·q–1). Rappelons les équivalences suivantes, 1 J = 1N · m et 1 N = 1 kg · m·s–2.
Il y a donc quatre unités de base: kg, m, s et la quantité de proies q.Dans la notation générale de la description de la démarche, le problème comporte six variables \(u = B, W_1 = A, W_2 = \rho, W_3=\sigma, W_4=e\) et \(W_5=h.\) L’équation de départ est :
\[B = f (A; \rho; \sigma; e; h),\]
où f est une fonction inconnue. Il faut déterminer une combinaison du produit des variables, A; \(\rho\); \(\sigma\); e et h, ayant les mêmes unités que B.Puisqu’il y a quatre unités de base et cinq variables, une des grandeurs de f est redondante et on ne conserve que quatre variables, les grandeurs primaires :
\[P_1 =\rho, P_2 =\sigma, P_3 = e \: \text{et} \: P_4 =h.\]
Il faut trouver les exposants \(\alpha, \beta, \gamma\) et \(\delta\) tels que :
\[\begin{array} {r c l}kg \cdot m^2 \cdot s^{-3}& = & (q \cdot m^{-2})^{\alpha}(m \cdot s^{-1})^{\beta}(kg \cdot m^2 \cdot s^{-2} \cdot q^{-1})^{\gamma}(s \cdot q^{-1})^{\delta} \\& = &m^{-2\alpha+\beta+2\gamma} + s^{-\beta-2\gamma+\delta}+ q^{\alpha-\gamma-\delta}kg^{\gamma}. \end{array}\]
Pour équilibrer les kilogrammes, il faut que \(\gamma= 1\) et pour déterminer \(\alpha, \beta\) et \(\delta,\) il reste à résoudre le système d’équations linéaires :
\[\left \{ \begin {array} {r c l} -2\alpha+\beta+2&=&2 \\-\beta + 2 + \delta &= &-3\\ \alpha -1-\delta&=&0 \end{array} \right .\]
La solution est \(\alpha = \beta = 0, \delta= -1\) et \(\gamma = 1\). C’est-à-dire que la quantité eh–1 a les mêmes unités que B et en divisant l’équation \(B = f(A; \rho; \sigma; e; h)\) par eh–1, on obtient :
\[\frac{Bh}{e} = \frac{h}{e} f(A;\rho;\sigma;e;h).\]
Le terme \(\Pi:= Bh/e\) est sans dimension puisque toutes les unités s’annulent. Comme précédemment, on écrit :
\[G(A;\rho;\sigma;e;h)=\frac{h}{e}f(A;\rho;\sigma;e;h)\]
et donc :
\[\Pi =G(A;\rho;\sigma;e;h).\: (3)\]
Que faire avec la variable A?
Puisqu’elle est redondante, elle est appelée quantité secondaire et désignée par \(S_1 = A.\) On utilise les grandeurs primaires pour la réécrire en éliminant les unités. Par une démarche similaire à celle ci-haut, on obtient :
\[m^2 = ((q \cdot m^{-2})(m \cdot s^{-1})(s \cdot q^{-1}))^{-2}\]
ce qui veut dire que la quantité \(\Pi_1=\rho \sigma h \sqrt{A}\) est sans dimension. En isolant A, on a \(A = (\rho \sigma h)^{-2} \Pi{_1}^{-2}\) et :
\[\Pi =G((\rho \sigma h)^{-2} \Pi{_1}^{-2};\rho; \sigma;e;h):=F(\Pi_1 ;\rho;\sigma;e;h), \]
où puisque G est inconnue, nous pouvons remplacer cette fonction par F. Puisque \(\Pi\) est sans dimension, le côté droit de l’équation doit aussi être sans dimension. Ce qui veut dire que F dépend uniquement de \(\Pi_1\)&nbap;:
\[\Pi = F (\Pi_1).\]
Ce résultat est remarquable puisqu’il démontre que le problème initial impliquant six variables peut se réduire à une relation entre deux variables uniquement: \(\Pi = Bh/e\) et\(\Pi_1 = \rho \sigma h \sqrt{A}.\) On peut aller plus loin et supposer que F(0)=0, c’est-à-dire qu’un territoire d’aire A=0 n’apporte aucune contribution aux besoins énergetiques. Nous ajoutons l’hypothèse que F est une fonction croissante. De plus, en écrivant
\[B = \frac{e}{h} F (\Pi_1) ,\]
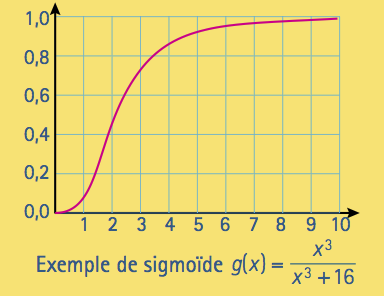 on remarque que le ratio e/h est le taux de consommation maximal puisque cette expression suggère que l’animal passe tout son temps à manger sans faire de déplacements. Nous pouvons donc affirmer que B≤ e/h et nous supposons que F a une asymptote horizontale vers 1 lorsque \(\Pi_1\) tend vers l’infini. Il y a plusieurs fonctions satisfaisant ces conditions. Par contre, les écologistes s’entendent (en ajoutant une hypothèse) pour dire que F doit être une fonction de type « sigmoïde », c’est-à-dire, en forme de S, comme dans la figure ci-contre.
on remarque que le ratio e/h est le taux de consommation maximal puisque cette expression suggère que l’animal passe tout son temps à manger sans faire de déplacements. Nous pouvons donc affirmer que B≤ e/h et nous supposons que F a une asymptote horizontale vers 1 lorsque \(\Pi_1\) tend vers l’infini. Il y a plusieurs fonctions satisfaisant ces conditions. Par contre, les écologistes s’entendent (en ajoutant une hypothèse) pour dire que F doit être une fonction de type « sigmoïde », c’est-à-dire, en forme de S, comme dans la figure ci-contre.
Les grandeurs \(B, A, \rho, \sigma, e,\) et \(h\) pour une espèce particulière sont mesurables. Évidemment, pour ce faire, les écologistes doivent y mettent beaucoup d’efforts. Lorsque ces valeurs sont obtenues, la relation simple donnée par \(\Pi, \Pi_1\) et la sigmoïde permet d’avoir une synthèse efficace d’un problème initialement complexe.
G.I. Taylor et l’explosion nucléaire
En 1950, le mathématicien et physicien anglais G.I. Taylor publia deux articles sur la modélisation mathématique de la formation d’ondes de chocs lors d’une explosion violente en s’aidant de la méthode d’analyse dimensionnelle présentée dans les deux exemples que nous venons de voir. Dans le deuxième article, Taylor applique sa théorie au cas du premier essai nucléaire effectué au Nouveau-Mexique en 1945 et parvient à estimer l’énergie libérée par l’explosion à près de 17,5 kilo-tonnes (kT) en n’utilisant pour son estimation que des photos identifiant temporellement la formation du nuage nucléaire. Or, les responsables américains ont révélé, sans plus de précisions, que cette énergie se situait entre 15 et 20 kT, les données et calculs sur cet essai nucléaire étant secrets d’état. Nous allons voir comment G.I. Taylor s’y est pris pour arriver a son résultat. Lors de recherches précédentes, G.I. Taylor avait amassé un bagage scientifique pour comprendre les différents facteurs intervenant dans une telle explosion. Il prit comme point de départ la relation suivante
\[r = f(t; E; \rho_0; P_0), \: (4)\]
où r est le rayon d’expansion de l’onde de choc, t le temps, E l’énergie, \(\rho_0\) la densité
de l’air ambiante et P0 la pression atmosphérique. Encore une fois, la fonction f est inconnue. Il y a trois unités fondamentales: la masse (en kg), la distance (en mètres) et le temps (en secondes). Les unités des grandeurs de l’équation (4) sont les mètres (m) pour r, les secondes (s) pour t et les autres demandent le petit rappel suivant. L’énergie pour une particule de masse m se déplaçant à une vitesse v est donnée par l’équation E = (mv2)/2, ce qui implique que l’énergie a comme unités kg·m2·s–2. La pression atmosphérique est définie par une mesure de force (en Newtons, N) par unité de surface (m2) ce qui se traduit par des unités de kg·m·s–2. La densité de l’air est une masse volumique avec les unités kg·m–3.
À nos trois unités fondamentales nous associons (comme dans l’exemple en écologie) trois grandeurs primaires : le temps \(P_1 = t,\) l’énergie \(P_2 = E\) et la densité \(P_3 = \rho_0.\) D’autres choix peuvent être faits bien entendu et le lecteur peut vérifier l’impact d’un choix différent. Nous avons une quantité secondaire qui est \(S_1 = P_0.\)
L’équation reliant les unités de u = r avec les unités des grandeurs primaires est :
\[m = s^{\alpha}(kg \cdot m^2 . s^{-2})^{\beta}(kg \cdot s^{-3})^{\gamma},\]
ce qui donne à résoudre le système d’équations :
\[\left \{ \begin {array} {r c l} \beta + \gamma & = & 0\\2\beta-3\gamma & = & 1 \\ \alpha – 2 \beta &=& 0 \end {array} \right .\]
dont la solution est \(\alpha=2/5, \beta=1/5\) et \(\gamma =-1/5.\) Nous pouvons alors construire la quantité, sans dimension, associée au côté gauche de l’équation (4) :
\[\Pi = r \left ( \frac{\rho_0}{t^2E} \right )^{1/5}.\]
Nous allons aussi obtenir une quantité sans dimension pour la quantité secondaire S1 = P0. Puisque S1 a comme unités kg · m–1 ·s–2 le système d’équations à résoudre est :
\[\left \{ \begin {array} {r c l} \beta + \gamma & = & 1\\2\beta-3\gamma & = & -1 \\ \alpha – 2 \beta &=& -2 \end {array} \right .\]
Il faut remarquer ici que le côté gauche des équations du système est le même que précédemment, ce qui est normal puisque nous utilisons les trois mêmes unités de base: kg, m et s. Ce système a comme solution \(\alpha=-6/5, \beta=2/5\) et \(\gamma =3/5.\) Nous avons donc la quantité sans dimension :
\[\Pi_1 = P_0 \left ( \frac{t^6}{E^2\rho_{0}^{3}} \right )^{1/5}.\]
Comme nous l’avons vu dans les exemples précédents, en multipliant l’équation (4) pour que le côté gauche soit sans dimension, on obtient :
\[r \left ( \frac{\rho_0}{t^2E} \right )^{1/5} = \left ( \frac{\rho_0}{t^2E} \right )^{1/5} f(t;E;\rho_0;P_0).\]
et nous écrivons :
\[G(t;E;\rho;P_0)= \left ( \frac{\rho_0}{t^2E} \right )^{1/5} f(t;E;\rho;P_0).\]
Comme précédemment, on peut remplacer la quantité secondaire \(P_0\) par \(\Pi_1\) et changer G pour F :
\[r \left ( \frac{\rho_0}{t^2E} \right )^{1/5} = F(t;E;\rho_0;\Pi_1).\]
Or, nous savons que le côté droit ne peut dépendre des variables primaires et donc l’équation devient :\[r \left ( \frac{\rho_0}{t^2E} \right )^{1/5} = F(\Pi_1).\]
ou similairement :
\[r \left ( \frac{t^2E}{\rho_0} \right )^{1/5} F \left ( P_0 \left (\frac{t^6}{E^2\rho_{0}^{3}} \right )^{1/5} \right ).\]
Ici, Taylor supposa en premiere approximation que F est une fonction constante F ≈ F0, puisque pour un temps court comme celui de l’explosion, le terme t6 est très petit par rapport au terme d’énergie E2. Des connaissances empiriques sur les explosions lui font choisir F0 = 1. Nous avons alors,
\[r \left ( \frac{t^2E}{\rho_0} \right )^{1/5} ,\]
où la densité de l’air \(\rho-0\)=1,25kg.m–3. Grâce aux images à l’échelle et chronométrées qui furent diffusées par le gouvernement américain, Taylor a eu accès a une série de valeurs de r et t correspondant à l’évolution de l’explosion. Il ne reste plus qu’une seule variable, E, dans l’équation et ainsi Taylor a pu estimer l’énergie.
Comme les exemples présentés le démontrent, la méthode d’analyse dimensionnelle est un outil très utile pour simplifier l’étude de phénomènes dans une variété de domaines scientifiques. L’exemple de l’explosion atomique tel qu’analysé par G.I. Taylor montre la puissance de cette approche et les résultats surprenants qui en découlent.
Théorème de l’analyse dimensionnelle
La méthode d’analyse dimensionnelle remonte aux travaux du physicien anglais John William Strutt (1842-1919), lauréat du prix Nobel de physique de 1904. Strutt est plus connu sous le titre de Lord Rayleigh. Une première formulation systématique de l’analyse dimensionnelle fut proposée en 1878 par Joseph Louis François Bertrand (1822-1900). Les calculs des exemples de cet article sont valides pour un nombre arbitraire de variables et le théorème général en ce sens fut prouvé en 1892 par l’ingénieur des télégraphes et mathématicien français Aimé Vaschy (1857-1899). La formulation présentée ici remonte à 1914 et est due au physicien américain Edgar Buckingham (1867-1940). Comme nous avons fait dans les exemples, les grandeurs mesurables sont notées par les variables \(u,W_1,…,W_n\) et nous supposons que celles-ci satisfont :
\[u = f(W_1;…;W_n),\]
où f est une fonction inconnue. Nous allons supposer que notre problème a \(m ≤ n\) unités de base toutes provenant du système international. Ceci nous permet de séparer les grandeurs \(W_1, \ldots, W_n\) en m grandeurs primaires \(P_1,\ldots,P\) et \(n–m\) grandeurs secondaires \(S1,\ldots,S_{n–m}\). Puisque l’on a autant de grandeurs primaires que d’unités, nous construisons une quantité D avec les mêmes unités que la quantité u en écrivant :
\[D=P{_1}^{\alpha_1} \ldots P{_m}^{\alpha_m}\]
où les exposants \(\alpha_1,\ldots, \alpha_m\) sont les inconnues. La clé ici est qu’avec des méthodes d’algèbre linéaire, il est possible de démontrer qu’il existe une seule solution \(\alpha_1,\ldots, \alpha_m\) du système d’équations. On définit la quantité sans dimension \(\Pi:= u/D\) et alors notre équation originale se transforme en :
\[\Pi = \frac{u}{D} = \frac{1}{D}f (P_1;…;P_m ;S_1 ;…;S_{n-m}). \]
Pour chaque quantité secondaire, on définit \(D_j = P{_1}^{\alpha_1, j} \ldots P{_m}^{\alpha_m, j}\) et ici aussi les exposants sont uniques. Ceci nous donne les grandeurs sans dimension \(\Pi_j:=S_j/D_j\) pour \(j = 1,…, n-m\) et alors :
\[\Pi = \frac{1}{D}f(P_1:\ldots;P_m;D_1\Pi_1;\ldots D_{n-m}\Pi_{n-m}).\]
Puisque la fonction f est inconnue, nous pouvons renommer le côté droit de l’équation :
\[\Pi =F(P_1;…;P_m;\Pi_1;…;\Pi_{n-m}). \]
Comme nous l’avons vu dans les exemples, le côté droit ne peut dépendre des grandeurs avec dimensions \(P_1,…,P_m.\) Ceci implique que l’équation de départ de u en fonction de \(W_1, \ldots, W_n\) est transformée en :
\[u = DF(\Pi_1;…;\Pi_m).\]
Nous pouvons donc résumer cette dérivation générale.
Théorème
Un modèle mathématique donné par une relation \(u = f(W_1;…;W_n),\) inchangée pour tout système d’unités de mesure, peut se réécrire comme une relation sans dimension des grandeurs originales,
\[u = DF(\Pi_1;…;\Pi_m).\]
Pour en s\(\alpha\)voir plus!
- Illner, R., Bohun, C.S., McCollum, S., van Roode, T., Mathematical Modelling: A case studies approach. AMS, 2004.
- Stephens D.W. et Dunbar S.R., Dimensional analysis in behavioral ecology. Behavioral Ecology, 4 (1993), 172-183.
- Taylor G.I., (1950). The Formation of a Blast Wave by a Very Intense Explosion. I. Theoretical Discussion. Proceedings of the Royal Society A. 201 (1065): 159-174.
- Taylor G.I., (1950) The Formation of a Blast Wave by a Very Intense Explosion. II. The Atomic Explosion of 1945. Proceedings of the Royal Society A. 201 (1065): 175-186.
- Voir aussi « Des prédateurs et leurs proies », Accromath. vol. 8.1 hiver-printemps 2013. ↩