
Classifier des objets c’est, entre autres, les regrouper en sous-ensembles partageant des propriétés communes. On utilise pour cela des relations d’équivalence. Comment décrire efficacement ces classes d’équivalence? Les invariants sont un outil très utile. Les applications ne manquent pas, que ce soit pour décrire la morphologie animale ou pour décider si le cube de Rubik que vous avez remonté au hasard à partir de ses morceaux a une solution.
Commençons par un premier exemple.
 La forme d’une ellipse
La forme d’une ellipse
Sur la figure les ellipses de même couleur ont la même forme. Quelle est ici la relation d’équivalence? Deux ellipses ont la même forme si l’une est l’image de l’autre par une similitude. La forme est décrite par l’excentricité. Celle-ci nous ramène à une définition non standard des coniques (voir encadré).
Définition d’une conique par l’excentricité
Une conique de foyer F, de directrice D x d’excentricité e est le lieu géométrique des points dont le rapport de la distance au foyer sur la distance à la directrice est égal à e:
\[\frac{|PF|}{|PQ|} =e.\]
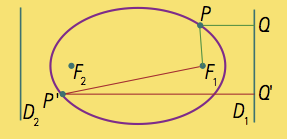
L’ellipse correspond à \(e < 1. \)

La parabole correspond à \(e = 1.\)

Et l’hyperbole correspond à \(e >1.\)
Le cercle est le cas limite où la droite est à l’infini: il correspond donc à \(e = 0.\)
Un invariant est une fonction qui associe à chaque élément un « objet mathématique » qui est le même pour tous les éléments d’une classe d’équivalence.
L’excentricité (voir encadré) est donc un invariant pour la relation d’équivalence « avoir la même forme » pour les coniques. C’est même un invariant complet car il caractérise les classes d’équivalence: deux coniques ont la même forme si et seulement si elles ont la même excentricité. En particulier, toutes les paraboles, de même que tous les cercles, ont la même forme!
Nous allons identifier des invariants pour d’autres problèmes de classification. Mais, ils ne seront pas toujours complets…
Un peu de topologie
Si nous avions permis à nos ellipses d’être en élastique et déformables et que nous avions regardé une relation d’équivalence plus faible: deux objets sont équivalents si on peut déformer l’un dans l’autre sans faire de coupures, alors nous aurions obtenu que toutes nos ellipses sont équivalentes entre elles. Par contre, elles ne sont pas équivalentes à la parabole.
La topologie étudie les propriétés invariantes sous une déformation sans coupure. Deux objets sont homéomorphes si on peut déformer l’un dans l’autre de manière continue sans faire de coupure. La dimension topologique (voir encadré) est un invariant sous cette relation d’équivalence. Ainsi une courbe, un objet de dimension 1, ne peut pas être déformée en une surface, un objet de dimension 2. De même une surface ne peut être déformée en un volume. La dimension topologique n’est pas un invariant complet: un cercle et une droite ont tous deux dimension 1, mais on ne peut déformer l’un dans l’autre. Par contre, on peut déformer un cercle dans une ellipse.
La dimension topologique
Commençons par deux exemples. Le segment ]0; 1[ est inclus dans la réunion des trois segments ]0; 0,6[, ]0,3; 0,8[ et ]0,2; 1[. L’intersection de ces trois segments est non vide: c’est le segment]0,3; 0,6[. On peut rapetisser le troisième segment à ]0,7; 1[ de manière à ce que l’intersection des trois segments soit maintenant vide. Mais, on ne peut faire mieux : on ne peut éliminer les intersections de deux segments et garder un recouvrement de ]0; 1[ .
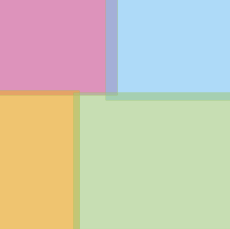
Regardons maintenant un carré recouvert par quatre rectangles ouverts ayant une intersection non nulle.

On peut se convaincre qu’on peut, en rapetissant les rectangles s’assurer que leur intersection soit vide. Mais, on ne peut éliminer les intersections de trois rectangles.
Si on regardait un cube dans l’espace recouvert par huit parallélépipèdes ouverts ayant une intersection non vide, on pourrait rapetisser les parallélépipèdes à des ouverts (quitte à ce que ce ne soit plus des parallélépipèdes) de telle sorte que toutes les intersections de plus de quatre ouverts soient vides. Mais on ne pourrait pas éliminer les intersections de quatre ouverts.
Ceci nous amène à la définition de dimension topologique.
La dimension topologique d’un objet est inférieure ou égale à n si, pour tout recouvrement fini par des ensembles ouverts, on peut rapetisser ces ouverts de telle sorte que l’intersection de n + 2 d’entre eux soit vide. Cette dimension est exactement égale à n si, de plus, elle n’est pas inférieure à n – 1.
La classification des surfaces
Si maintenant, on se limite à des surfaces orientées sans bord, alors il existe un invariant complet pour la relation d’équivalence « être homéomorphe », qui est donné par le genre de la surface, soit le nombre de trous.


Ainsi un ballon de baseball est homéomorphe à la sphère, et une tasse à anse à un tore.
Classifier les formes du monde animal
 Le biologiste, Harry Blum a introduit un nouvel outil pour aider à caractériser la forme des individus d’une même espèce et distinguer les espèces les unes des autres.
Le biologiste, Harry Blum a introduit un nouvel outil pour aider à caractériser la forme des individus d’une même espèce et distinguer les espèces les unes des autres.
Cet outil est appelé squelette. Le squelette d’une forme pleine en 2D ou en 3D est défini ainsi: supposons que la forme soit faite d’un matériau combustible homogène et qu’on allume le feu partout en même temps sur les points de la frontière. Le front de flammes se propage vers l’intérieur. Alors, le squelette est le lieu des points où le feu s’éteint faute de combustible parce qu’un front de flammes en rejoint un autre. Nous nous limiterons aux formes en deux dimensions. Ainsi, le squelette d’un cercle est son centre. Le squelette d’un carré est formé de ses diagonales.
Voici le squelette d’un rectangle,

et celui d’une ellipse:

On voit dans les exemples du carré et du rectangle que le squelette schématisé a la forme d’un graphe avec des sommets et des arêtes. On peut introduire une relation d’équivalence sur les graphes.
Deux graphes G et H sont équivalents s’il existe une bijection f entre l’ensemble S(G) des sommets de G et l’ensemble S(H) des sommets de H telle que deux sommets v1 et v2 de G sont reliés par une arête de G si et seulement si les sommets f(v1) et f(v2) de H sont reliés par une arête de H.
Mais comment se forment les branches du squelette? Dans un disque, tous les points du front de flammes atteignent simultanément le centre du disque et le feu s’y éteint.

Donc, il est naturel de vouloir comparer localement la frontière du domaine à un cercle. Regardons un des sommets de l’ellipse le long du grand axe. On y dessine des cercles de plus en plus grand tangents à l’ellipse. Au début les petits cercles sont inclus dans l’ellipse. Puis, à partir d’une certaine taille ils débordent de l’ellipse.
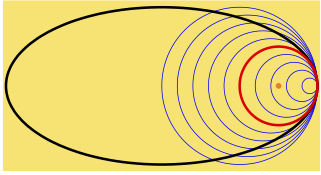
Le cercle osculateur est le plus grand cercle tangent à l’ellipse en son intérieur: c’est celui qui épouse le mieux la forme de l’ellipse près du point de tangence. Si les flammes atteignent son centre, alors son centre est le début d’une branche du squelette.

Par contre, si le front de flammes rencontre un autre front de flammes avant d’atteindre le centre du cercle osculateur, alors il n’y a pas formation de branche.

Plus le bord de la surface est courbé, plus le rayon du cercle osculateur est petit, plus il y de chance qu’une nouvelle branche se forme.
Essayons de voir sur un exemple comment les idées de Harry Blum peuvent s’appliquer. Il existe plusieurs espèces d’ours, dont les ours noirs, les ours bruns ou grizzlis, et les ours blancs. On pourrait croire que la couleur permet de les distinguer. Il n’en est rien: l’ours noir peut être brun, ou même blanc quand c’est un ours Kermode.

« Spiritbear » by The original uploader was Jackmont at English Wikipedia – Transferred from en.wikipedia to Commons.. Licensed under CC BY-SA 3.0 via Wikimedia Commons.
Par contre, le grizzli a sur le dos, au niveau du cou, une bosse caractéristique: cette bosse se traduit par une branche additionnelle du squelette.

{kind=link}
L’ours blanc a aussi une telle bosse. Par contre, sa tête est beaucoup plus plate au niveau des oreilles: il n’a pas de branche du squelette à cet endroit, comparativement au grizzli.

« Polar Bear 2004-11-15 » by Ansgar Walk – Own work. Licensed under CC BY-SA 2.5 via Wikimedia Commons.
{kind=link}
Nous voyons donc que les mathématiques peuvent fournir des outils pour caractériser la morphologie des différentes espèces.
Le cube de Rubik
Votre soeur a démonté votre cube de Rubik en morceaux. Ces morceaux comprennent huit blocs de coin et 12 blocs milieu.

« Disassembled-rubix-1 » by User Curis on en.wikipedia. Licensed under CC BY 2.5 via Wikimedia Commons.
{kind=link}
Vous l’avez remonté, mais depuis ce temps, vous ne réussissez plus à le faire. L’avez vous remonté correctement? Il n’est pas très clair comment cette question est reliée à ce qui précède… C’est pourtant le cas.
Une configuration du cube est la donnée de la couleur de chacun des petits carrés sur chaque face du cube. Introduisons une relation d’équivalence sur les configurations du cube de Rubik. Deux configurations sont équivalentes si on peut passer de l’une à l’autre par une suite de mouvements élémentaires. Les mouvements élémentaires du cube, au nombre de 12, consistent à tourner une face du cube d’un quart de tour dans un sens ou dans l’autre. Ce faisant, on permute les blocs de coin entre eux et les blocs milieu entre eux.
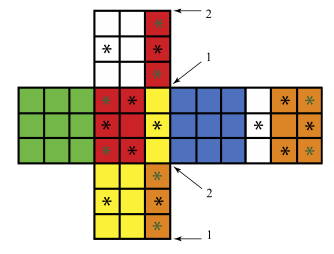
Par contre, les blocs au centre des faces restent toujours fixes. Les deux permutations des blocs coin et des blocs milieu ne sont pas indépendantes: un invariant va mesurer cette dépendance. Regardons un de ces mouvements élémentaires

Si on numérote 1, 2, 3, 4, les blocs des coins et également 1, 2, 3, 4, les blocs milieu qui ont bougé alors, après la rotation, on a dans les deux cas la permutation 2, 3, 4, 1.
Chacune de ces permutations a un signe (voir encadré). Dans notre exemple, ce signe est –1. Le produit des signes est égal à 1. Dans le cas général, le produit des signes des deux permutations, que nous appellerons d, est un invariant. Pour s’en convaincre, il suffit de s’assurer que c’est le cas pour chaque mouvement élémentaire.
Nous allons maintenant introduire deux autres invariants, un pour les blocs coin, et un pour les blocs milieu. À eux trois, ils formeront un invariant complet.
Pour ces deux autres invariants, nous devons marquer exactement une case de chacun des blocs coin et exactement une case de chacun des blocs milieu.
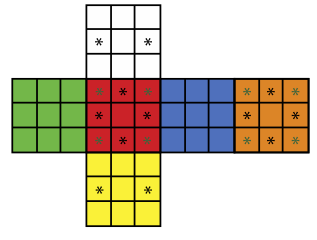
Regardons maintenant une configuration quelconque du cube et comparons-la avec la configuration du cube dans laquelle toutes les faces sont unicolores. Les faces marquées ne sont plus à la même place qu’auparavant pour les positions correspondantes du cube.
Dans le cas des blocs coin, pour chacun de ces blocs, il faut faire une rotation de 0×120°, 1×120° ou 2×120° pour ramener la face marquée du bloc coin de la deuxième configuration sur la face marquée du bloc coin de la première configuration (cette rotation s’effectue dans le sens positif en regardant le cube).
On associe donc, à chacun des huit blocs coins, un nombre, 0, 1 ou 2, selon la rotation effectuée. Prenons la somme de ces huit nombres, et soit C le reste de la division de ce nombre par 3. Alors, ce nombre C est notre deuxième invariant. On peut s’en convaincre en vérifiant que c’est le cas pour chaque mouvement élémentaire.
On fait la même chose avec les blocs milieu. Ici, il s’agit de rotations d’angle 0×180° ou 1×180°. On associe donc à chacun des 12 blocs milieu un nombre 0 ou 1. Prenons la somme de ces 12 nombres, et soit M le reste de la division de ce nombre par 2. Le nombre M est notre troisième invariant.
Tel qu’annoncé, le triplet (d, C, M) est un invariant complet. En particulier, on pourra réussir le cube si et seulement si (d, C, M) = (0, 0, 0). Ceci nous indique comment remonter le cube:
- on peut placer les sept premiers bloc coins au hasard;
- en plaçant le huitième bloc coin,ons’assure que C = 0;
- on peut placer les dix premiers blocs milieu au hasard;
- il y a alors deux permutations possibles pour les deux derniers blocs milieu. Il faut prendre celle qui garantit que d = 0: on place alors le onzième bloc milieu;
- quant au douzième bloc milieu, il faut l’orienter de la bonne manière pour que M = 0.
Classification des frises, des pavages, des cristaux
L’article Cristaux1 montre comment classifier les cristaux par leurs ensembles de symétrie. La relation d’équivalence est donc « avoir des ensembles (groupes) équivalents de symétries ». De la même manière, on fait la classification des frises en une dimension, et des pavages du plan en 2D. Sous cette relation d’équivalence, il existe 7 groupes de frise et 17 groupes de pavages du plan.
À vous de continuer le jeu et de trouver d’autres invariants essentiels dans des problèmes de classification.
Le signe d’une permutation
Une permutation de n objets numérotés 1, 2, …, n peut s’écrire comme la composition de transpositions, chaque transposition consistant à échanger deux éléments. Ainsi la permutation envoyant 1, 2, 3, 4, sur 2, 3, 4, 1 peut s’écrire comme la suite des trois transpositions:
1, 2, 3, 4, envoyé sur 2, 1, 3, 4,
2, 1, 3, 4 envoyé sur 2, 3,1, 4,
2, 3, 1, 4 envoyé sur 2, 3, 4, 1.
Ce n’est pas l’unique choix. Par contre, la parité du nombre de transpositions utilisées pour décomposer une permutation est toujours la même. On dit que le signe de la permutation est +1 si ce nombre est pair, et –1, s’il est impair.
- « Cristaux », Accromath, été-automne 2015 ↩