
Au volant d’une voiture, quelle distance devrions-nous maintenir avec le véhicule qui nous précède sur la route? La « règle du 2 secondes » est-elle fiable?
 Pour réduire les risques de carambolage sur la route, on a coutume de dire qu’il convient de maintenir un délai de 2 secondes entre le moment où la voiture qui nous précède passe devant un repère et celui où notre propre voiture passe devant ce même repère. Est-ce suffisant? Ce temps correspond-il à la distance nécessaire pour freiner?
Pour réduire les risques de carambolage sur la route, on a coutume de dire qu’il convient de maintenir un délai de 2 secondes entre le moment où la voiture qui nous précède passe devant un repère et celui où notre propre voiture passe devant ce même repère. Est-ce suffisant? Ce temps correspond-il à la distance nécessaire pour freiner?
Pour décrire le freinage en situation de danger, considérons la courbe ci-contre qui représente, en fonction du temps, la vitesse d’une voiture qui doit s’arrêter de toute urgence.
Temps et distance de réaction
Entre le moment où le danger est perceptible devant la voiture en mouvement (au temps \(t = 0\) en \(A),\) et le moment où son conducteur applique les freins (en \(B\)), il faut d’abord compter un certain délai.
Ce délai correspond au temps mis par le conducteur pour percevoir le danger, prendre la décision de freiner et coordonner le mouvement nécessaire à cette fin. Pour simplifier, appelons cela le temps de réaction, que nous noterons \(t_r.\) Dans le meilleur des cas, le temps de réaction est d’environ une seconde, mais un état de fatigue, une consommation d’alcool, un manque de concentration ou une réaction de panique qui amène à figer (plus fréquente chez les conducteurs de peu d’expérience) fait facilement doubler ce temps. Durant ce temps, la voiture « ignore » tout du danger qui la menace et continue de circuler à la vitesse initiale \(v_i\) qu’elle avait juste avant que le danger ne se présente. Elle parcourt alors une distance de réaction \(d_r = v_i\times t_r\)1. Cette distance correspond à l’aire du rectangle de la zone I du graphique.
Temps et distance de freinage
En \(B,\) lorsque les freins sont appliqués, la voiture est alors soumise à une décélération que nous supposerons constante, c’est-à-dire à un taux de variation \(a\) sur la vitesse qui demeure constant et négatif, pour tout le temps \(t_f\) que dure le freinage, c’est-à-dire, jusqu’à ce que le véhicule s’immobilise en \(C.\) En considérant les points \(B(t_r,v_i)\) et \(C(t_r+t_f,0),\) on peut écrire :
\[a=\frac{0-v_i}{t_r+t_f-t_r}=\frac{-v_i}{t_f}\]
et en déduire que le temps de freinage \(t_f\) vaut \(-v_i /a.\) Ce temps est bien positif car \(a < 0.\)
 Quelle distance l’auto parcourt-elle durant ce temps de freinage \(t_f\! \)? Le problème peut paraître plus complexe ici car la vitesse change constamment. L’« astuce », à la base du calcul intégral, consiste alors à la considérer constante sur de très petits intervalles de temps, à évaluer la distance parcourue sur chacun de ces petits intervalles et à additionner ces distances.
Quelle distance l’auto parcourt-elle durant ce temps de freinage \(t_f\! \)? Le problème peut paraître plus complexe ici car la vitesse change constamment. L’« astuce », à la base du calcul intégral, consiste alors à la considérer constante sur de très petits intervalles de temps, à évaluer la distance parcourue sur chacun de ces petits intervalles et à additionner ces distances.
Pour chacun de ces intervalles, la distance parcourue correspond à l’aire d’un rectangle de très petite largeur (c’est-à-dire chacun des rectangles jaunes du graphique). Comme la distance de freinage équivaut à la somme de ces distances, on peut montrer, en faisant tendre vers zéro la durée de ces intervalles de temps, que la distance de freinage correspond bien à l’aire sous la courbe de la vitesse durant la période de freinage, et donc à l’aire du triangle rectangle de la zone II sur le graphique initial. La distance de freinage peut alors être exprimée ainsi :
\[d_f = \frac{v_i \times t_f}{2}=-\frac{v_i^2}{2a}, \text{ car } t_f=\frac{-v_i}{a}\]
Une distance sécuritaire
En somme, la distance totale \(d_T\) parcourue entre le moment où le danger est perceptible et le moment où le véhicule est immobilisé est constituée de deux composantes : la distance de réaction, linéaire par rapport à la vitesse initiale, et la distance de freinage, qui elle est quadratique par rapport à cette même vitesse initiale.
\[ d_T = d_r + d_f = v_i \times t_r – \frac{v_i^2}{2a}\]
L’heuristique des deux secondes, qui évalue la distance parcourue durant 2 secondes à une vitesse constante de \(v_i,\) ne couvrira que la stricte distance de réaction, si le temps de réaction (\(t_r\)) est lui aussi de deux secondes. Pour que l’incident se termine bien, il faudra que le conducteur du véhicule qui précède dispose lui-même d’une distance de freinage suffisante et que la capacité de freiner du second véhicule soit au moins aussi bonne que celle du premier. Or, la décélération possible (le paramètre \(a\)) dépend à la fois de la charge du véhicule, de l’état des freins, des conditions de la route et de l’adéquation des pneus (type, qualité, état) à ces conditions. Pour des routes sèches, mouillées et glacées, on peut compter avec des décélérations moyennes (en valeur absolue) de \(8\text{ m/s}^2,\) \(4 \text{ m/s}^2\) et \(2\text{ m/s}^2\) respectivement.
Peut-on alors se doter d’une heuristique simple qui permette d’évaluer une distance plus sécuritaire en incluant la distance de freinage? Le graphique ci-dessous, qui illustre la distance totale parcourue en fonction de la vitesse, et ce pour différentes conditions routières et un temps de réaction d’une seconde, suggère d’opter pour un délai de 3 secondes entre deux voitures sur une route sèche (suffisant jusqu’à 115 km/h), 4 secondes sur une route mouillée (suffisant jusqu’à 86 km/h) et 6 secondes sur une route glacée (suffisant jusqu’à 72 km/h). Est-ce envisageable avec la densité de circulation sur nos routes?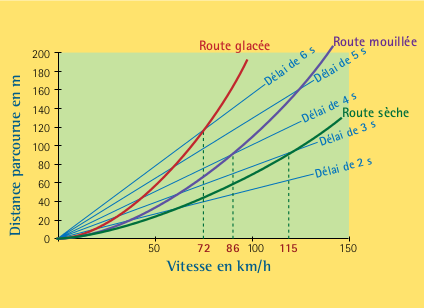
Pour en s$\alpha$voir plus!
Haefner, L. E. Introduction to Transportation Systems. New York : Holt, Rinehart, and Winston, 1986.
- Cette relation, comme celles qui suivent, tient à la condition de maintenir une cohérence entre les unités. Si l’on veut évaluer la distance en mètres à partir d’une vitesse en km/h, on transformera cette dernière en m/s en divisant par 3,6, car cela équivaut à multiplier par 1 000 m/km et à diviser par 3 600 secondes/heure. ↩