
Bien campés dans notre monde en 3D, il nous est difficile d’imaginer et de décrire un univers en quatre dimensions ou plus. Soulevons le voile en explorant les propriétés des analogues du cube et de la sphère en haute dimension.
Introduction
En contemplant une feuille de papier quadrillé, vous vous êtes peut-être déjà demandé à quoi la vie pourrait ressembler pour des êtres confinés à sa surface. Auraient-ils conscience de la troisième dimension? Pourrions-nous les convaincre de son existence et la leur faire imaginer? Ce sont des questions de ce type qu’un enseignant anglais du nom d’Edwin A. Abbott (1838-1926) a explorées dans une œuvre de fiction mathématique intitulée Flatland, parue en 1884 et disponible en traduction française sous le titre Flatland ou Le plat pays.
Dans cet ouvrage, un carré doté d’une conscience décrit la vie dans un plan, imagine ce qu’elle pourrait être sur une droite et comment il s’y prendrait pour convaincre ses habitants (qui sont des segments de droite) de l’existence d’une deuxième dimension. Dans le roman de Abbott, le carré est ensuite visité par une sphère en 3D qui cherche à lui faire comprendre qu’elle est plus qu’un cercle. Une fois qu’il a saisi, le carré s’aventure à imaginer, avec plus ou moins de succès, ce à quoi pourrait ressembler une quatrième dimension. Jugé comme hérétique par ses congénères, il finit en prison.
Heureusement, les mathématiques nous donnent le loisir d’explorer en toute impunité les propriétés d’un monde comportant plus de trois dimensions spatiales. Il n’en est pas moins difficile de se le représenter. C’est ce que nous allons essayer de faire ici en examinant les propriétés du cube et de la sphère en haute dimension.
Le cube et sa construction
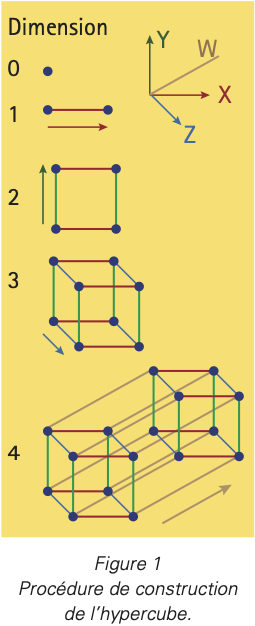 Le cube est un objet qui nous est familier. On pense par exemple à un dé, qui se disait kubos en grec ancien. Aussi appelé hexaèdre, c’est l’un des cinq solides réguliers de Platon. Il comporte 6 faces, 12 arêtes et 8 sommets, comme on peut le voir à la figure 1. Le cube de côté $c$ est un polyèdre dont toutes les arêtes mesurent $c$ unités et dont le volume, par conséquent, est égal à $c^3$.
Le cube est un objet qui nous est familier. On pense par exemple à un dé, qui se disait kubos en grec ancien. Aussi appelé hexaèdre, c’est l’un des cinq solides réguliers de Platon. Il comporte 6 faces, 12 arêtes et 8 sommets, comme on peut le voir à la figure 1. Le cube de côté $c$ est un polyèdre dont toutes les arêtes mesurent $c$ unités et dont le volume, par conséquent, est égal à $c^3$.
Dans les mondes en dimension 1 et 2, les analogues du cube de côté $c$ sont respectivement le segment de longueur $c$ et le carré de côté $c.$ Ils sont aussi représentés à la figure 1, qui illustre en couleurs par quel procédé on peut passer de l’un à l’autre par construction. Pour bâtir un carré à partir d’un segment de droite, par exemple, il faut faire glisser ce dernier sur une distance égale à sa longueur dans une direction perpendiculaire à son orientation.
Pour un segment de droite vivant dans Lineland, c’est plus facile à dire qu’à faire car son monde est unidimensionnel. Lui qui ne peut qu’avancer ou reculer, il n’a aucune idée de ce que signifie le terme « perpendiculaire » ou l’expression « tourner de 90 degrés ». De même, comment un carré pourrait-il s’élever perpendiculairement au sol dans un monde planaire où il n’y a ni haut ni bas?
Le tesseract et sa représentation
On ne saisit vraiment la difficulté d’imaginer un monde en haute dimension qu’en tentant de se représenter le cube en 4D, aussi appelé « tesseract ». Car si la figure 1 illustre le procédé à suivre pour le construire, elle ne nous permet pas de visualiser le résultat, faute de 4e dimension.
La théorie de la relativité (restreinte et générale) d’Einstein (1879-1955) a popularisé l’idée que le temps est la 4e dimension. L’analogie est toutefois imparfaite car le temps ne se mesure pas dans les mêmes unités que les dimensions spatiales et il est difficile de percevoir en quoi il leur est perpendiculaire. De plus, l’espace-temps est courbe et donc radicalement non euclidien. Et de toute façon, la métaphore n’est plus d’aucun secours pour imaginer un monde en 5D ou plus.
Pour tenter de comprendre la nature du tesseract ou de tout autre objet en dimension $d≥4$, on en est donc réduit à n’en contempler que des projections, c’est-à-dire l’ombre qu’ils projettent dans notre monde lorsqu’ils sont éclairés par un soleil imaginaire situé « à la verticale » derrière eux.
Un carré de côté $c$ qui est projeté sur une droite parallèle à l’une de ses arêtes se réduit à un segment de longueur $c$. On peut donc voir son ombre dans Lineland. Lorsqu’il pivote autour de son centre, son ombre demeure un segment de droite mais sa longueur oscille alors continument entre $c$ et $\sqrt{2c}$, la valeur maximale étant atteinte à un angle de 45 degrés. Imaginez la stupeur d’un segment de droite, dont la longueur est fixe, faisant la rencontre d’un être dont la longueur varie ainsi à volonté!
C’est un bon exercice de géométrie euclidienne que de décrire les différentes projections dans le plan d’un cube qui pivote autour de son centre. Mais à quoi peuvent bien ressembler les projections d’un cube en 4D? La question a passionné nombre de scientifiques et d’artistes, dont le mathématicien et auteur de science-fiction anglais Charles Howard Hinton (1853-1907), à qui on doit le terme « tesseract ». L’historienne d’art américaine Linda Dalrymple Henderson (1948-) a consacré un ouvrage entier à la quatrième dimension et à la géométrie non euclidienne dans l’art moderne.
 Deux représentations 3D du tesseract sont données ci-contre. La figure 2a est un diagramme de Schlegel, c’est-à- dire une projection obtenue par un point donné à travers une de ses surfaces. La figure 2c montre un dépliage 3D du tesseract, que le peintre Salvador Dalí (1904-1989) a incorporé dans un tableau intitulé Corpus Hypercubus (1954). Pour fins de comparaison, le diagramme de Schlegel en 2D d’un cube en 3D est fourni à la figure 2b.
Deux représentations 3D du tesseract sont données ci-contre. La figure 2a est un diagramme de Schlegel, c’est-à- dire une projection obtenue par un point donné à travers une de ses surfaces. La figure 2c montre un dépliage 3D du tesseract, que le peintre Salvador Dalí (1904-1989) a incorporé dans un tableau intitulé Corpus Hypercubus (1954). Pour fins de comparaison, le diagramme de Schlegel en 2D d’un cube en 3D est fourni à la figure 2b.
Grâce au diagramme de Schlegel présenté à la figure 2a, on peut vérifier que le tesseract comporte 16 sommets, 32 arêtes, 24 faces planes carrées et 8 faces tridimensionnelles cubiques. Ces dernières sont les éléments constitutifs du patron cruciforme de la figure 2c. Des calculs simples permettent aussi de vérifier que le volume (en 4D) du tesseract est $c^4$, que sa surface externe (en 3D) est $8c^3$ et que son aire totale (en 2D) est $24c^2.$
Ces calculs s’étendent à l’analogue du cube en toute dimension $d≥4,$ appelé « hypercube ». Ils font appel aux équations découvertes par le géomètre allemand Max Dehn (1878-1952) et étendues par le mathématicien et astronome écossais Duncan Sommerville (1879-1934). L’Allemand Manfred Mohr (1938-) compte au nombre des artistes qui se sont intéressés aux projections de l’hypercube; voir figure 3. Les liens entre l’hypercube et l’hypersphère sont eux aussi révélateurs.
![Œuvre P-499-Am de la série « Laserglyphs » réalisée en 1993 par Manfred Mohr, fondée sur des projections orthogonales en 2D du cube unité en dimension $d = 6,$ aussi appelé hexeract. Les quinze lignes brisées représentent les $d (d –1)/2 = 15$ projections d'une des $2^{d–1}d! = 23 040$ trajectoires possibles le long des arêtes liant deux sommets diamétralement opposés, c'est-à-dire deux sommets liés par une des $2d/2 = 32$ diagonales de longueur $\sqrt{d}$ [acier/peinture, 15 pièces, 120 x 540 cm2 , reproduite avec la permission de l'artiste].](https://accromath.uqam.ca/wp-content/uploads/2020/08/univers-3.png)
Œuvre P-499-Am de la série « Laserglyphs » réalisée en 1993 par Manfred Mohr, fondée sur des projections orthogonales en 2D du cube unité en dimension $d = 6,$ aussi appelé hexeract. Les quinze lignes brisées représentent les $d (d –1)/2 = 15$ projections d’une des $2^{d–1}d! = 23 040$ trajectoires possibles le long des arêtes liant deux sommets diamétralement opposés, c’est-à-dire deux sommets liés par une des $2^{d–1}=32$ diagonales de longueur $\sqrt{d}$ [acier/peinture, 15 pièces, 120 x 540 cm, reproduite avec la permission de l’artiste].
L’hypersphère inscrite dans l’hypercube
La sphère est un autre des objets familiers de notre univers. C’est la surface du ballon parfaitement rond de notre enfance. Mathématiquement, c’est l’ensemble des points à égale distance du centre. Quant au solide délimité par cette surface, on l’appelle souvent « boule ». Les mêmes définitions valent en toute dimension, d’où les termes « hypersphère » et « hyperboule ». Mais pour alléger la présentation, nous parlerons simplement de cubes, de sphères et de boules en précisant au besoin la dimension.
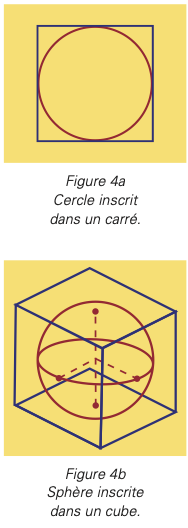 En dimension 1, l’analogue de la boule de rayon $c$ centrée à l’origine n’est autre que le segment $[-c, c]$. Il coïncide donc avec le cube de côté $2c$ de même centre. Ainsi dans Lineland, point de distinction entre une boule et un segment de droite ! En 2D, la boule est le disque délimité par le cercle inscrit au carré $[-c, c]^2.$ Le terme « inscrit » fait ici référence au fait que le cercle est tangent aux arêtes du carré; voir figure 4a. Ce carré centré à l’origine est ainsi le plus petit qui puisse contenir le cercle. La même construction est possible en toutes dimensions; voir figure 4b pour l’analogue en 3D.
En dimension 1, l’analogue de la boule de rayon $c$ centrée à l’origine n’est autre que le segment $[-c, c]$. Il coïncide donc avec le cube de côté $2c$ de même centre. Ainsi dans Lineland, point de distinction entre une boule et un segment de droite ! En 2D, la boule est le disque délimité par le cercle inscrit au carré $[-c, c]^2.$ Le terme « inscrit » fait ici référence au fait que le cercle est tangent aux arêtes du carré; voir figure 4a. Ce carré centré à l’origine est ainsi le plus petit qui puisse contenir le cercle. La même construction est possible en toutes dimensions; voir figure 4b pour l’analogue en 3D.
À l’évidence, le volume de la sphère de rayon $c$ en dimension $d$ est toujours inférieur à celui du cube de côté $2c,$ puisqu’elle y est inscrite. Étonnamment, la proportion du cube occupée par la boule décroît au fur et à mesure que $d$ augmente. Par exemple, elle vaut 1 en dimension $d = 1$ (car la boule et le segment coïncident), $\pi/4$ en dimension $d = 2$ et $\pi/6$ en dimension $d = 3.$ Elle devient éventuellement négligeable en très haute dimension!
En effet, imaginons qu’on choisisse un vecteur $(X_1, \ldots, X_d)$ au hasard dans le cube $[-c, c]^d.$ Pour ce faire, on doit prendre $X_1$ au hasard dans l’intervalle $[-c, c]$, puis faire de même avec $X_2,$ et ainsi de suite jusqu’à $X_d.$ Le vecteur sera aussi un élément de la boule si $X_{1}^{2}+\cdots+X_{d}^{2} ≤ c^2.$ Remarquons que cela ne peut se produire que si tous les termes de la somme sont inférieurs à $c^2/2$, sauf peut-être un. Dans le cas contraire, on aurait alors $X_{1}^{2}+\cdots+X_{d}^{2} > 2×c^2/2 = c^2$ et donc le vecteur ne serait pas dans la boule.
Or, compte tenu que pour tout $i,$
\[Pr(a≤X_i ≤b)=(b−a)/(2c),\]
on a
\[\begin{array}{r c l}Pr(X_{i}^{2}>c^2/2)&=&1−Pr(−c\sqrt{2}≤X_1 ≤c/\sqrt{2})\\ &=&1−\{c/\sqrt{2}−(−c/\sqrt{2})\}/(2c)\\&=&1−1/\sqrt{2}\approx 0{,}293. \end{array}\]
Par suite, les chances que le vecteur $(X_1,\ldots,X_d)$ soit un élément de la boule sont moins grandes que celles d’avoir au plus un échec au terme de $d$ essais mutuellement indépendants dont la probabilité de succès est $1/ \sqrt{2} \approx 0{,}707.$ En termes mathématiques, on a
\[Pr(X_{1}^{2}+\cdots+X_{d}^{2}≤c^2) ≤ (0{,}707)^d + d (0{,}293) (0{,}707)^{d-1}\]
et le terme de droite est une fonction décroissante de $d≥3$ qui tend rapidement vers 0. Sa valeur est de 0,009 quand $d = 20$ et de $3{,}768 \times 10^{-14}$ quand $d = 100.$
 En faisant appel au calcul intégral, on peut en fait montrer plus précisément qu’en dimension $d,$ le volume de la boule de rayon $c$ est égal à
En faisant appel au calcul intégral, on peut en fait montrer plus précisément qu’en dimension $d,$ le volume de la boule de rayon $c$ est égal à
\[\text{Vol}(S_c) = c^d \pi^{d/2}/\Gamma(d/2+1),\: \: (1)\]
où $\Gamma(\cdot)$ est la fonction gamma d’Euler qui généralise la notion de factorielle. Par conséquent, la proportion du volume du cube occupée par la boule est donnée par la formule
\[2^{–d}\pi^{d/2}/\Gamma(d/2+1). \: \: (2)\]
La valeur de ce ratio est précisée au tableau 1 pour les neuf premiers entiers. On constate qu’il diminue rapidement et on vérifie sans peine qu’il tend vers 0 quand $d$ tend vers l’infini.
Un résultat contre-intuitif
Une autre façon de voir les choses, c’est qu’à mesure que la dimension $d$ augmente, la boîte minimale nécessaire pour emballer une boule de volume 1 devient de plus en plus grosse. La raison est que les $2^d$ coins du cube $[-c, c]^d$ constituent des espaces vides de plus en plus grands et nombreux à mesure que $d$ augmente. Et pourtant, la boîte est aussi petite que possible et si son contenu est fragile – pensons à une boule de cristal – il se trouve mal protégé aux points de tangence.
 Pour une expédition postale sécuritaire dans Flatland, supposons qu’un carré $[-c, c]^2$ soit divisé en quatre parts égales le long des axes et inscrivons un cercle de rayon $c$ dans chacune d’entre elles, tel qu’illustré à la figure 5a. On peut imaginer que ces quatre cercles représentent des disques de styromousse destinés à protéger des chocs le disque central, dont le rayon est tout juste assez long pour toucher aux quatre cercles et donc éviter tout déplacement en cours d’expédition.
Pour une expédition postale sécuritaire dans Flatland, supposons qu’un carré $[-c, c]^2$ soit divisé en quatre parts égales le long des axes et inscrivons un cercle de rayon $c$ dans chacune d’entre elles, tel qu’illustré à la figure 5a. On peut imaginer que ces quatre cercles représentent des disques de styromousse destinés à protéger des chocs le disque central, dont le rayon est tout juste assez long pour toucher aux quatre cercles et donc éviter tout déplacement en cours d’expédition.
Puisque chacun des quatre cercles blancs est inscrit dans un carré de côté $c$, son diamètre mesure $c$ unités. De plus, la distance entre l’origine et n’importe quel sommet du carré est $\sqrt{2}c$ par le théorème de Pythagore. Le rayon de la boule rouge est donc la moitié de $\sqrt{2}c – c,$ soit $(\sqrt{2} – 1)c/2$.
 De toute évidence, la même construction peut être réalisée en toute dimension. Quand $d = 3,$ on voit à la figure 5b qu’il y a huit boules de styromousse de rayon $c$. Cependant, le rayon de la boule rouge est maintenant $(\sqrt{3} – 1)c/2,$ car la plus longue diagonale du cube $[0, c]^3$ est la racine carrée de $c^2 + c^2 + c^2$ par le théorème de Pythagore. En général, il y a autant de boules de styromousse que de sommets du cube, soit $2^d,$ et le rayon de la boule rouge est $(\sqrt{d} −1)c/2$.
De toute évidence, la même construction peut être réalisée en toute dimension. Quand $d = 3,$ on voit à la figure 5b qu’il y a huit boules de styromousse de rayon $c$. Cependant, le rayon de la boule rouge est maintenant $(\sqrt{3} – 1)c/2,$ car la plus longue diagonale du cube $[0, c]^3$ est la racine carrée de $c^2 + c^2 + c^2$ par le théorème de Pythagore. En général, il y a autant de boules de styromousse que de sommets du cube, soit $2^d,$ et le rayon de la boule rouge est $(\sqrt{d} −1)c/2$.
 Jusque-là, ça va. Mais un apparent paradoxe émerge quand on se rend compte qu’en dimension $d = 9,$ la boule rouge devient tangente à l’hypercube et qu’en toute dimension $d ≥ 10,$ une partie de son volume se trouve en dehors de la boîte. Bonjour l’emballage! De plus, le volume de la boule rouge devient éventuellement plus grand que celui du cube. Bonsoir l’intuition! En fait, quand $d \to \infty,$
Jusque-là, ça va. Mais un apparent paradoxe émerge quand on se rend compte qu’en dimension $d = 9,$ la boule rouge devient tangente à l’hypercube et qu’en toute dimension $d ≥ 10,$ une partie de son volume se trouve en dehors de la boîte. Bonjour l’emballage! De plus, le volume de la boule rouge devient éventuellement plus grand que celui du cube. Bonsoir l’intuition! En fait, quand $d \to \infty,$
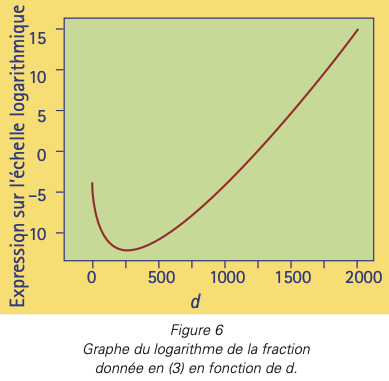
\[\frac{\{\sqrt{\pi}(\sqrt{d}-1)/4\}^d}{\Gamma(d/2+1)}\to \infty, \: \: (3)\]
comme on peut le vérifier au moyen de l’approximation de Stirling. La figure 6 montre le comportement du logarithme de cette fraction en fonction de $d.$ Le ratio devient plus grand que 1 autour de $d = 1200$ et tend éventuellement vers l’infini.
 Ne cherchez pas l’erreur. Il n’y en a pas. Le problème est dans votre tête, pas dans les maths. Pour vous en convaincre, regardez plutôt la figure 7, qui donne deux représentations 3D de l’hypercube en dimension 16. Si la première est bien conforme à notre intuition, la seconde a de quoi étonner.
Ne cherchez pas l’erreur. Il n’y en a pas. Le problème est dans votre tête, pas dans les maths. Pour vous en convaincre, regardez plutôt la figure 7, qui donne deux représentations 3D de l’hypercube en dimension 16. Si la première est bien conforme à notre intuition, la seconde a de quoi étonner.
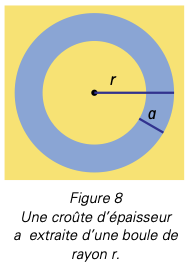
Par ailleurs, il se trouve qu’une grande partie du volume de la boule en dimension $d$ se trouve loin de l’origine. En effet, étant donné une croûte d’épaisseur $a$ à la périphérie d’une boule de rayon $r,$ tel que représenté à la figure 8, la proportion du volume occupé par l’anneau est donnée par la formule
\[1 -\text{Vol}(S_{r-a})/ \text{Vol}(S_r)=1-(r-a)^d/r^d. \: \:(4)\]
Or, quel que soit $a < r,$ cette fraction tend vers 1 quand $d$ tend vers l’infini. C’est ce fait, conjugué à la nature de l’hypercube révélée par la figure 7, qui lève le paradoxe.
Un autre résultat étonnant
Si vous pensiez avoir tout compris, détrompez-vous. Voici un autre résultat paradoxal, qui concerne cette fois l’accumulation de masse dans une toute petite bande autour de l’équateur de la sphère en haute dimension.
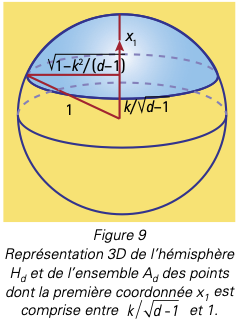
Supposons sans perte de généralité que la sphère est de rayon 1. Fixons un nombre $k > 1$ et pour toute dimension $d ≥ k^2 + 1,$ considérons l’hémisphère $H_d$ constitué de l’ensemble des points $(x_1, \ldots, x_d)$ tels que $x_1 ≥ 0$ et l’ensemble $A_d$ des vecteurs $(x_1, \ldots, x_d)$ de la sphère tels que $x_1 \geq k / \sqrt{d −1}$; voir figure 9. L’ensemble $A_d$ s’appelle une couche sphérique. On déduit de la formule (1) que
\[\begin{array}{r c l}\text{Vol}(H_d)&=&\frac{1}{2}\text{Vol}(S_d) \\ &=&\text{Vol}(S_{d-1}) \displaystyle \frac{\sqrt{\pi} \Gamma \{(d+1)/2 \} }{2 \Gamma (d/2+1)}. \end{array} \]
Par ailleurs, on peut montrer à l’aide du calcul intégral que
\[\text{Vol}(A_d)=\text{Vol}(S_{d-1})\int_{k/\sqrt{d-1}}^{1}(1-x_{1}^{2})^{(d-1)/2}dx_1,\]
de sorte que
\[\frac{\text{Vol}(A_d)}{\text{Vol}(H_d)}=\frac{2 \Gamma(d/2+1)}{\sqrt{\pi} \Gamma \{(d+1)/2 \}} \int_{k/\sqrt{d-1}}^{1}(1-x_{1}^{2})^{(d-1)/2}dx_1.\]
Grâce à cette expression, il est possible de vérifier que
\[\displaystyle \frac{\text{Vol}(A_d)}{\text{Vol}(H_d)} \leq \frac{2}{k}e^{-k^2/2}. \: \: (5)\]
Noter que cette borne est valable quelle que soit la dimension $d.$ Quand $k < 1{,}096$ (voir figure 10), la borne est supérieure à 1 et donc triviale car il est évident que le ratio $\text{Vol}(A_d)/\text{Vol}(H_d)$ est toujours inférieur à 1. Toutefois, la borne s’approche exponentiellement vite de 0 à mesure que $k$ grandit. De plus, pour toute valeur de $k$ fixée, le ratio $k / \sqrt{d −1}$ devient rapidement négligeable quand $d$ tend vers l’infini.

Il s’ensuit qu’en très haute dimension, presque tout le volume de la boule unité est situé dans une bande de largeur aussi petite que l’on veut autour de l’équateur! Pour le montrer, on commence par se donner une valeur de $k$ suffisamment grande pour que la borne en (5) soit aussi petite que voulu. Par exemple, la borne vaut $7{,}4 \times 10^{–3}$ quand $k = 3.$ Pour ce choix de $k$, on a qu’en toute dimension $d ≥ 10,$ une proportion d’au moins 99,26 % de la masse de l’hémisphère se trouve dans la bande délimitée par l’équation $0 \leq x-1 \leq 3/\sqrt{d −1}.$ La largeur de cette bande est de 0,3 quand $d = 10$ mais seulement de 0,03 quand $d =$ 10 000, etc. Et encore, nous ne sommes pas au bout de nos surprises, car par symétrie, n’importe quel diamètre de la boule unité constitue un équateur! Il y a de quoi en perdre son latin, non?
Interprétation probabiliste des résultats
En termes probabilistes, l’inégalité (5) permet de conclure que si on choisit au hasard deux vecteurs de la boule unité en haute dimension, les chances que leur produit scalaire soit inférieur à $k/\sqrt{d −1}$ en valeur absolue sont aussi proches de 100 % que l’on veut.
En effet, une fois le premier vecteur $(x_1, \ldots, x_d)$ choisi, on peut opérer une rotation de la boule pour faire en sorte que les composantes du vecteur soient toutes nulles sauf la première. Puis, étant donné un nombre $\epsilon > 0$ aussi petit que l’on veut, on choisit $k > 1$ suffisamment grand pour que $4e^{-k^2/2}/ k<\epsilon$. Il y a alors une probabilité d’au moins $1 – \epsilon$ que la première composante $y_1$ du second vecteur $(y_1, \ldots, y_d)$ vérifie $|y_1| \leq k /\sqrt{d −1}$. Le cas échéant, la valeur absolue du produit scalaire entre les deux vecteurs est inférieure à $10^{–m}$ dès que $d ≥ 10^{2m} \times k^2 + 1$ parce que $|x_1 y_1 | ≤ |y_1|.$
Dit autrement, les chances sont très élevées que deux vecteurs choisis au hasard dans $S_d$ soient quasiment orthogonaux quand $d$ est suffisamment grand. De plus, en tenant compte du résultat découlant de l’équation (4), les deux vecteurs ont aussi de très fortes chances d’être situés à proximité de la surface de $S_d,$ c’est-à-dire aux confins de l’hyperboule.
Ces résultats, qui peuvent être étendus à un échantillon de taille arbitraire, trouvent diverses applications en statistique, où les dimensions d’un vecteur correspondent aux différentes variables mesurées sur un même individu. Un des défis auxquels font face les statisticiens consiste à caractériser un nuage de points en haute dimension en lui trouvant des projections à deux ou trois dimensions qui soient significatives et représentatives des liens entre les variables. En ce sens, leur travail n’est pas si différent de celui des artistes et des géomètres fascinés par l’univers en haute dimension. Et bien que les mathématiques nous aident à y voir plus clair, nous sommes hélas presque aussi dépourvus en intuition que les bons habitants de Flatland.
Pour en s\(\alpha\)voirplus !
- Abbott, E.A. (1884). Flatland: A Romance of Many Dimensions. Seeley & Co., Londres.
- Blum, A., Hopcroft, J. & Kannan, R. (2014). Foundations of Data Science. doi10.13140/2.1.5115.0726.
- Burger, D. (1965). Sphereland: A Fantasy About Curved Spaces and an Expanding Universe. Thomas Y. Crowell Co., New-York.
- Hayes, B. (2011). « An adventure in the Nth dimension ». The American Scientist, vol. 99: 442.
- Henderson, L.D. (2013). The Fourth Dimension and Non-Euclidean Geometry in Modern Art.
MIT Press, Cambridge, MA.