
Pourquoi met-on dans la même famille des courbes aussi différentes que les ellipses, les paraboles et les hyperboles? Une première réponse est que ce sont des courbes obtenues comme section d’un cône par un plan1. Mais les liens familiaux entre ces courbes sont bien plus forts que cela. Par exemple, toutes ces courbes sont solutions du problème de Kepler : si une planète a une vitesse suffisante, alors elle parcourra plutôt une hyperbole ou encore une parabole avec le Soleil à un foyer. Mais encore…
Un argument en apparence farfelu pour lier les différentes coniques serait qu’une parabole est une ellipse qui accroche l’infini, et qu’une hyperbole est une ellipse qui a dépassé l’infini, si bien qu’un morceau est passé de l’autre côté… Essayons de faire un dessin en nous inspirant d’un modèle. Lorsqu’on parle d’astronomie, on parle de la sphère céleste : une sphère de rayon infini centrée au centre de la Terre et sur laquelle se meuvent les astres : chaque point de la sphère céleste correspond donc à une direction à l’infini. Ici, on va utiliser la même image, mais dans le plan. On va imaginer dans ce plan un cercle de rayon infini, que l’on appellera le cercle infini, ou encore, l’horizon. Chaque point du cercle correspond à la direction d’une demi-droite issue de l’origine dans le plan. On va tricher et représenter ce cercle infini par un cercle fini.
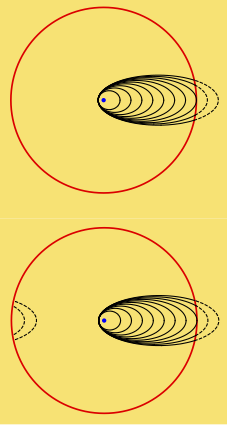 Prenons maintenant une ellipse de foyers en \(F_1 = (0, 0)\) et \(F_2 = (b, 0)\) où \(b>0.\) Supposons que celle-ci est le lieu géométrique des points \(P\) où \(|F1P| + |F2P| = b + r,\) pour \(b\) et \(r\) des constantes et \(r\) > 0.\) Lorsque \(b = 0,\) cette ellipse est un cercle. Faisons maintenant varier \(b\) de 0 à \(+ \infty.\) L’ellipse s’allonge de plus en plus et accroche le cercle infini lorsque \(b = + \infty.\) Puisque le cercle infini ne fait pas partie du plan, l’ellipse a perdu un point à l’infini. Elle n’est plus une courbe fermée : elle est devenue une parabole.
Prenons maintenant une ellipse de foyers en \(F_1 = (0, 0)\) et \(F_2 = (b, 0)\) où \(b>0.\) Supposons que celle-ci est le lieu géométrique des points \(P\) où \(|F1P| + |F2P| = b + r,\) pour \(b\) et \(r\) des constantes et \(r\) > 0.\) Lorsque \(b = 0,\) cette ellipse est un cercle. Faisons maintenant varier \(b\) de 0 à \(+ \infty.\) L’ellipse s’allonge de plus en plus et accroche le cercle infini lorsque \(b = + \infty.\) Puisque le cercle infini ne fait pas partie du plan, l’ellipse a perdu un point à l’infini. Elle n’est plus une courbe fermée : elle est devenue une parabole.
Continuons à étirer notre ellipse. Elle a maintenant dépassé l’infini et la portion qui manque, ainsi que son foyer associé a maintenant réapparu à gauche du côté \(b < 0\) : elle est devenue une hyperbole.
En fait, cet argument n’est pas si farfelu.
Comment rendre cet argument rigoureux?
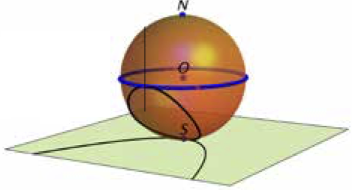
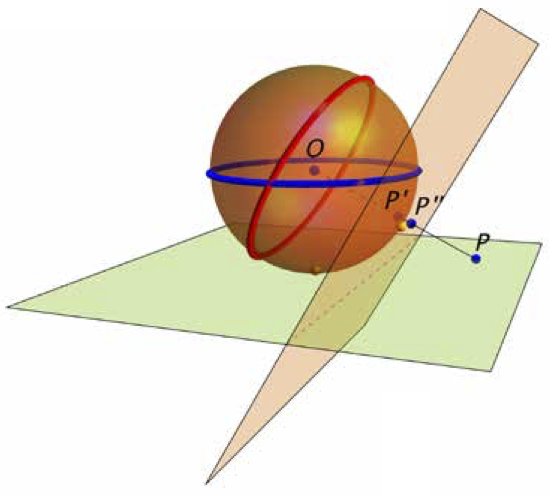
Les mathématiciens aiment bien les constructions audacieuses : on va ajouter des points à l’infini. Pour cela on commence par projeter le plan sur une sphère de centre O et de rayon 1, tangente au plan au pôle sud S. L’image d’un point P du plan est l’intersection P’ de la demi-droite OP avec la sphère.
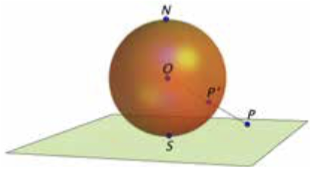
Alors, on voit qu’il y a une correspondance bijective entre les points du plan et les points de l’hémisphère inférieur, équateur non compris. Ainsi, si on veut ajouter des points à l’infini, il est naturel d’ajouter les points de l’équateur.
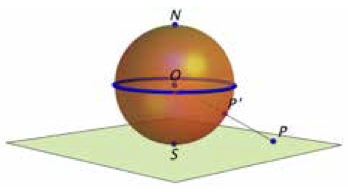
L’image d’une droite du plan est un grand cercle donné par l’intersection de la sphère avec le plan engendré par la droite et le centre du cercle.

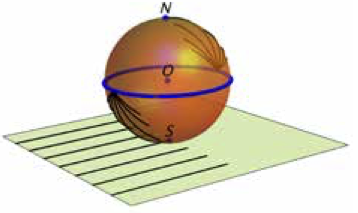
Toutes les demi-droites parallèles à une direction donnée se rejoignent en un même point de l’équateur. On donne ainsi un sens mathématique au phénomène bien connu que les deux bords de route ont l’air de se rejoindre à l’infini. Effectivement, sur la figure les images de nos demi-droites sont des courbes sécantes sur l’équateur.

Mais, il y a plus, la droite OP joignant un point P du plan au centre O de la sphère coupe la sphère en deux points, un point P’ dans l’hémisphère inférieur et un point P » dans l’hémisphère supérieur. Chaque point P a donc deux images sur la sphère. Voici par exemple les deux images de la famille de demi-droites parallèles dans le plan.
Ceci va nous permettre de donner un sens au fait
qu’une ellipse dépasse l’infini!
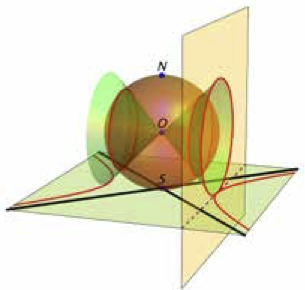
Considérons l’image d’une parabole: nous admettrons qu’elle est tangente à la sphère. (Un calcul un peu compliqué permettrait de le vérifier.)
Ajoutons maintenant une ellipse (en bleu) et une hyperbole (en rouge), ainsi que leurs images sur l’hémisphère inférieur.
On peut aussi choisir de représenter la branche arrière de l’hyperbole sur l’hémisphère supérieur : nous affirmons qu’elle vient alors compléter la deuxième branche pour venir décrire un ovale parfait sur la sphère, lequel a deux points d’intersection avec l’équateur.
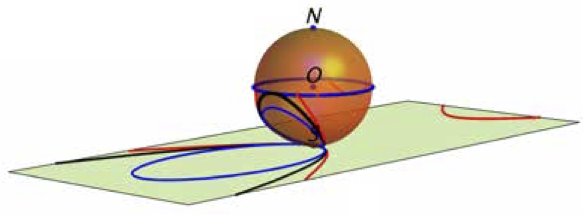
On voit qu’on a donné un sens au fait que l’ellipse devient tangente à l’infini, puis dépasse l’infini!
Le plan projectif
Revenons sur notre construction : pour pouvoir ajouter des points à l’infini correspondant aux directions des demi-droites allant à l’infini on a projeté le plan sur la sphère à partir du centre de la sphère. Les points de l’équateur ont alors naturellement représenté les directions à l’infini. Mais, ce faisant, on a vu qu’à chaque point du plan, il peut être naturel d’associer deux points de la sphère et que ce point de vue peut-être très utile.
Il y a un prix à payer dans cette construction : à un point du plan, on associe deux points de la sphère… Pour pallier les problèmes reliés à ce manque d’unicité, les mathématiciens font preuve d’imagination : ils créent un nouvel espace en identifiant les points diamétralement opposés de la sphère. Cet espace correspond à la demi-sphère inférieure et la moitié de l’équateur. Il est appelé plan projectif.
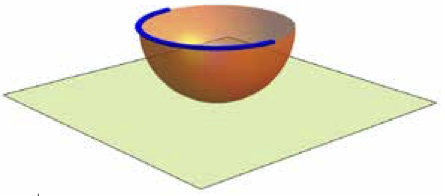
Cette représentation graphique est trompeuse parce que tous les points du bord de la demi-sphère doivent toucher à ce demi équateur. Il faut donc refermer ce « bol » ouvert. Pour le refermer, l’identification se fait en collant deux à deux les points diamétralement opposés. Ainsi, sur la figure, on doit coller ensemble les deux points rouges et, de même, les deux points jaunes.
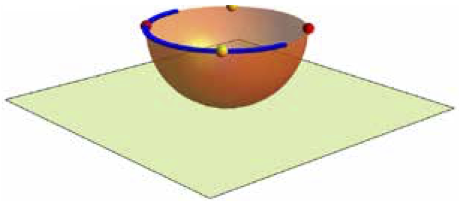
Mais ce collage n’est pas possible, on ne peut réaliser ce collage dans l’espace ambiant \(\mathbb{R}^3\) sans auto-intersection de la surface. Mais, ce petit problème n’arrête pas le mathématicien. Il travaille avec cet objet géométrique abstrait. Et il y travaille en mélangeant les deux points de vue : parfois en ne considérant que la demi-sphère inférieure, et parfois en considérant toute la sphère, tout en sachant que deux points diamétralement opposés sont identifiés.
Faire de la géométrie sur le plan projectif
La construction du plan projectif en identifiant les points diamétralement opposés est indépendante de l’équateur. Donc, la trace de l’équateur sur le plan projectif est identique à la trace de tout autre grand cercle et ne joue aucun rôle spécial.
Une droite dans le plan est envoyée par la projection sur un grand cercle de la sphère : celui-ci est obtenu comme intersection de la sphère avec le plan contenant le centre de la sphère et la droite. Donc, il est naturel de dire qu’une droite dans le plan projectif est obtenue en identifiant les points diamétralement opposés d’un grand cercle de la sphère. Deux grands cercles sur une sphère se coupent toujours en deux points diamétralement opposés.
Donc, deux droites distinctes de l’espace projectif ont toujours un unique point d’intersection.
Dans le plan projectif on a une parfaite « dualité » entre les droites et les points et cet énoncé est le « dual » de l’énoncé que nous connaissons déjà dans le plan euclidien et qui est encore valide dans le plan projectif :
Par deux points distincts il passe une et une seule droite.
Dans le cas de deux droites parallèles du plan, leur point d’intersection est sur l’équateur : les deux droites se coupent à l’infini. On a formalisé mathématiquement la perspective : les deux côtés de la route se rejoignent à l’infini. De même, toutes les droites parallèles à une direction semblent se rejoindre en un point.
Les coniques sur le plan projectif
Sur le plan projectif, on n’a qu’un seul type de coniques : ellipses, paraboles et hyperboles sont toutes des courbes fermées du plan projectif. Quelles sont les courbes qui leur correspondent sur la sphère? Ce sont des intersections avec la sphère de cônes dont le sommet est au centre de la sphère. Mais ces cônes peuvent être aplatis, c’est-à- dire construits sur des ellipses.
On pourrait se poser la question suivante, dont la réponse va nous apprendre beaucoup.
Quelles sont les transformations du plan projectif qui envoient des coniques dans des coniques?
On connaît de telles transformations. Les translations en sont, de même que les trans- formations linéaires. Ces transformations peuvent changer la forme d’une ellipse (son excentricité). Ainsi la transformation :
\[(x ,y ) \mapsto (x’,y’) = (2x ,y )\]
transforme l’ellipse :
\[\frac{x^2}{16}+\frac{y^2}{9}=1’\]
e demi-axes 4 et 3 en l’ellipse :
\[\frac{x’^2}{4}+\frac{y’^2}{9}=1’\]
de demi-axes 2 et 3.
Par contre, ni une transformation linéaire, ni une transformation affine ne peut transformer une ellipse en une parabole, ni en une hyperbole. Mais, s’il n’y a qu’un seul type de coniques dans l’espace projectif, il doit exister des transformations qui réalisent cela…
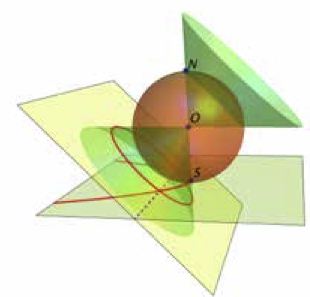
Regardons le cas de la transformation d’une ellipse en parabole. On a vu que lorsqu’on projette l’ellipse sur la sphère, la projection est contenue dans l’hémisphère inférieur et ne touche pas à l’équateur. Rappelons notre construction initiale: on a projeté le plan horizontal sur la sphère et les points de l’équateur ont alors correspondu aux points à l’infini du plan horizontal. Remarquons que le plan horizontal est parallèle au plan de l’équateur. Mais l’équateur n’est qu’un grand cercle particulier de la sphère. On peut donc prendre un grand cercle tangent à l’image de l’ellipse. On veut que ce grand cercle corresponde à notre nouvel équateur. Ce grand cercle doit donc correspondre aux nouveaux points à l’infini. Ce sera le cas si on projette les points de la sphère sur un des deux plans tangents à la sphère et parallèles au nouvel équateur. Une telle transformation est une transformation projective.
Plus généralement, les transformations projectives sont les compositions de transformations affines et de transformations projectives du type défini ci-dessus. On a alors un unique type de coniques!
Étant donné une conique dans le plan (x, y), il existe une transformation projective l’envoyant sur un cercle.
Voir encadré pour la construction d’une telle transformation projective.
Construction d’une transformation projective envoyant une conique dans un cercle
Regardons comment construire une telle transformation projective.
Dans le cas d’une ellipse que l’on peut ramener à la forme :
\[\frac{x^2}{a^2} + \frac{y^2}{b^2}=1,\]
une simple transformation donnée par des changements d’échelle différents en x et en y :
\[(x’, y’)= \left ( \frac{x}{a}, \frac{y}{b} \right ), \]
ramène l’équation à \(x’^2 + y’^2 = 1.\)
En utilisant une transformation affine, on peut ramener une hyperbole à la forme :
\[\frac{x^2}{a^2} – \frac{y^2}{b^2}=1,\]
et, en utilisant des changements d’échelle différents en x et en y comme ci-dessus, à :
\[x^2 – y^2 = 1,\: \: \: (*)\]
que l’on suppose située dans le plan \(z=-1.\) Projetons-là sur la sphère. Pour cela, on construit les droites joignant les points de l’hyperbole au point (0, 0, 0). Les points de cette droite sont de la forme \((X, Y, Z) = (tx, ty, -t)\) où \(t \in \mathbb{R}\)et \((x, y)\) satisfait à (*). Remarquons que \(X = tx = -xZ,\) et \(Y = ty = -yZ.\) Ceci permet de remplacer \(x\) par \(-X/Z\) et \(y\) par \(-Y/Z\) dans (*). En multipliant par \(Z^2,\) on obtient :
\[X^2-Y^2=Z^2. \: \: \: (**)\]
C’est l’équation de la surface conique engendrée par ces droites et qui coupent la sphère suivant deux ovales.
On doit maintenant projeter ces deux ovales sur un plan tangent à la sphère en un point. Ici on peut simplement prendre le plan \(X = 1,\) et remplacer dans (**). L’équation devient simplement :
\[Y^2 + Z^2 = 1.\]
qui est bien l’équation d’un cercle.
Regardons maintenant le cas d’une parabole. Par une transformation affine, on peut l’envoyer sur \(y = x^2.\) Comme ci dessus, on construit les droites joignant les points de la parabole au point (0, 0, 0), qui sont encore de la forme \((X,Y,Z)=(tx,ty,-t),\)où \(t \in \mathbb{R}\) et \(y = x^2.\) Remplaçons \(x\) par \(-X/Z\) et \(y\) par \(-Y/Z.\) On obtient \(YZ + X^2 = 0.\) Comme plan de projection, prenons le plan :
\[\frac{1}{\sqrt{2}} (Y – Z ) = 1,\]
qui est tangent à la sphère en :
\[ \left ( 0, \frac{1}{\sqrt{2}}, -\frac{1}{\sqrt{2}} \right ).\]
Sur ce plan, on remplace \(Z =Y – \sqrt{2}.\) On obtient \(Y (Y – \sqrt{2}) + X^2 = 0,\) que l’on peut écrire :
\[X^2+\left (Y-\frac{1}{\sqrt{2}}\right )^2 = \frac{1}{2}.\]
On pourrait croire que c’est l’équation d’un cercle. En fait, c’est une ellipse car les axes \(X\) et \(Y\) ne forment pas un repère orthonormé dans le plan :
\[\frac{1}{\sqrt{2}}(Y – Z ) = 1.\]
Mais on sait transformer une ellipse en cercle.
La famille des hyperboles
\[x^2 -y^2=C.\]
C’est un exemple intéressant à explorer. Comme \(x^2 – y^2 = (x+y)(x-y),\) toutes ces hyperboles ont les deux mêmes asymptotes \(y= \pm x.\) Pour \(C>0,\) on obtient les hyperboles rouges, pour \(C < 0\) les bleues et, pour \(C = 0,\) la conique dégénère en union de deux droites:
les deux asymptotes.

Voyons maintenant leurs projections sur la sphère
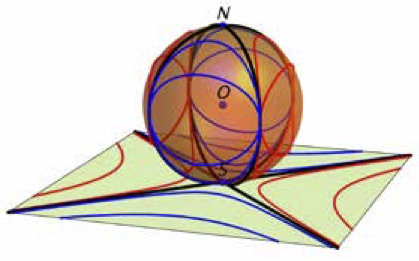
On voit que les deux asymptotes sont envoyées sur deux grands cercles verticaux qui se coupent aux pôles et découpent la sphère en quatre quartiers. Les hyperboles sont inscrites dans ces quartiers: une même hyperbole apparaît dans deux quartiers opposés car on a deux images sur la sphère. Toutes les hyperboles passent, ainsi que les asymptotes, par quatre points sur l’équateur. Quand on fait croître C de négatif à positif, les images des hyperboles bleues sur la sphère viennent se coller vers les images des asymptotes pour coïncider à \(C = 0\) avec les bords des quartiers. Elles deviennent ensuite rouges et passent dans les deux autres quartiers.
Retour sur le problème de Kepler
Dans le problème de Kepler, on considère un point fixe situé à l’origine O, et qui génère un champ gravitationnel. Un point matériel P est attiré vers O par une force inversement proportionnelle à \(|\overrightarrow{OP}|^2\) Le mouvement décrit par P dépend uniquement de la position initiale de P, ainsi que de sa vitesse initiale. On va supposer que la vitesse initiale est donnée par un vecteur \(\overrightarrow{v}\) perpendiculaire à \(\overrightarrow{OP}\) de longueur v. Si la vitesse v n’est pas très grande, alors le point P est prisonnier du champ gravitationnel et décrit une ellipse dont un des foyers est situé en O. Plus v augmente, plus l’ellipse s’allonge. Lorsque la vitesse v atteint une valeur critique\(v_c\), alors la trajectoire devient une parabole. Dans ce cas, le point P s’éloigne vers l’infini. Plus il s’éloigne, plus sa vitesse diminue jusqu’à atteindre une vitesse nulle à l’infini. Si \(v > v_c\), alors le point P s’éloigne encore vers l’infini, le long d’une branche d’hyperbole cette fois, et il arrive à l’infini avec une vitesse positive. On retrouve notre analogie que, dans le cas d’une hyperbole, on veut dépasser l’infini.
Ces trajectoires hyperboliques sont utilisées dans les missions inter-planétaires : par exemple pour changer la direction d’un engin spatial ou encore lui conférer de l’énergie en faisant passer l’engin suffisamment près d’une planète.